2.1.2. 암 간섭 방지 기능 설정
2.1.2. 암 간섭 방지 기능 설정
『[F2]: 시스템』 → 『4: 응용파라미터』 → 『7: 간섭방지』→ 『2: 암 간섭방지』를 선택합니다.
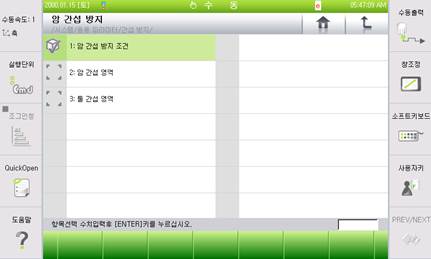
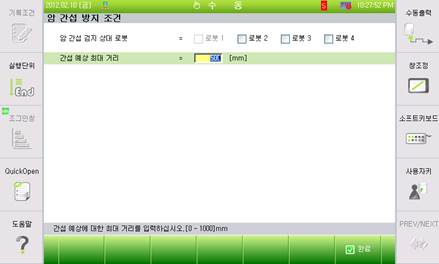
『1 : 암 간섭 방지조건』을 선택하여 암 간섭 방지를 유효로 설정하기 위해서 ‘암 간섭 검지 상대 로봇’을 선택합니다.
발생 가능한 에러 원인 | 만일 간섭 검지를 자신의 로봇에서 설정한 상대 로봇의 협조제어가 ‘무효’로 설정되어 있거나, 상대 로봇이 협조제어 HiNet 네트워크에 참여하지 않은 경우, 상대 로봇의 Arm간섭 방지 조건을 설정하지 않은 경우, 그리고 마지막으로 상대 로봇의 공통좌표계가 설정되어 있지 않은 경우 에러가 발생합니다. |
에러 메시지 | E0244 로봇 0)의 Arm 간섭검지가 불가능한 상태임 |
조치 방법 | 아래의 내용을 점검하십시오. |
상기 에러가 발생할 경우 다음 사항을 점검하십시오.
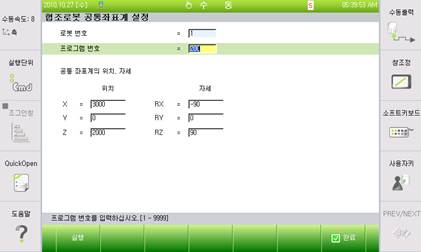
① 상대 로봇의 협조제어가 유효 상태이고 공통 좌표계를 설정하였는지 확인하십시오. 상대 로봇의 TP에서 협조제어 공통좌표계 설정이 되어 있는지는 『[F2]: 시스템』 → 『6: 자동정수설정』 → 『5: 협조제어 공통좌표계설정』에서 확인하십시오.
② 해당 로봇이 HiNet 네트워크에 참여하고 있는지 확인하십시오. HiNet네트워크 상태는 『[F1]: 서비스』 → 『1: 모니터링』 → 『10: 협조제어 데이터』→ 『1: 협조제어 상태』를 선택하면 화면 오른쪽에 로봇 1~4의 상태가 나타납니다. 이때 ‘----‘ 와 같이 표시된 로봇은 협조제어 네트워크에 참여하지 못한 네트워크입니다. 이때는 해당 로봇의 전원을 재투입하여 정상적으로 표시되는지 확인하십시오. 전원을 재투입 하여도 해결되지 않는 경우는 협조제어의 설정과 네트워크 연결선의 불량 등을 재 점검하시기 바랍니다.
