1.1. 시스템 구성
1.1. 시스템 구성
컨베이어 동기 시스템의 일반적인 구성 형태는 아래의 그림과 같습니다.
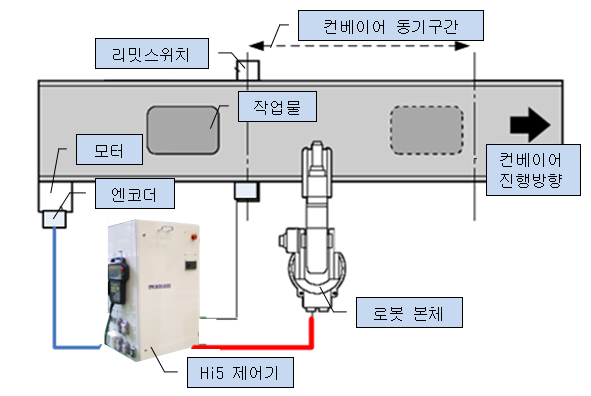
n 리밋스위치
작업물이 컨베이어상의 특정위치에 진입하였음을 제어기에게 알려주는 장치입니다. 리밋스위치가 있는 위치가 컨베이어 상의 작업물 위치판단의 기준점이 됩니다.
n 엔코더
컨베이어 구동부에는 모터의 회전량에 해당되는 펄스를 발생시키는 엔코더가 접속되어 있습니다. 그리고 이 엔코더는 로봇 제어기에 접속되어 컨베이어로부터 나오는 펄스가 로봇 제어기에 입력됩니다.