3.1. EtherNet/IP Adapter 설정
3.1. EtherNet/IP Adapter 설정
EtherNet/IP Adapter를 사용하기 위해서는 IP 주소 및 입출력 데이터 크기 등의 설정이 필요합니다. 다음과 같은 절차로 설정해 주시기 바랍니다.
(1) 『[F2]: 시스템』 → 『2: 제어 파라미터』 → 『2: 입출력 신호 설정』 → 『14:리얼타임 이더넷 설정과 진단』 항목을 선택합니다.
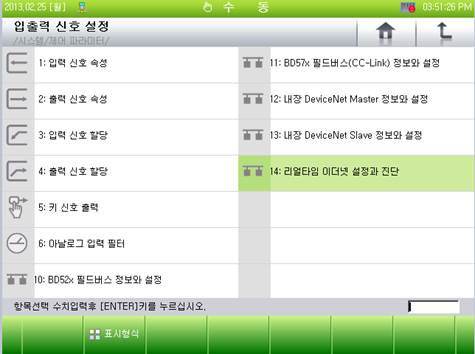
그림 3.1 리얼타임 이더넷 설정과 진단 메뉴
(2) EtherNet/IP Adapter는 3번 채널에 해당하므로 『[F3]: 전화면』 또는 『[F4]: 다음화면』 키를 사용해 3번 채널로 이동해 장치 타임에“EtherNet/IP Adapter”로 표시되는지 확인하시기 바랍니다.
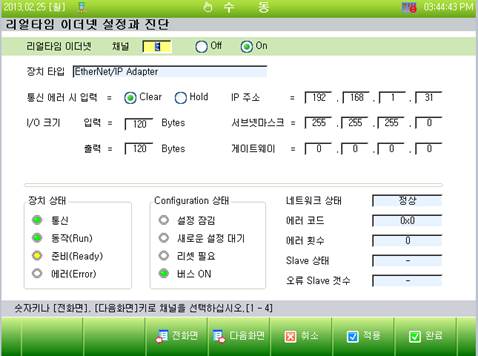
그림 3.2 EtherNet/IP Adapter 설정 화면
(3) IP 주소, 서브넷 마스크, 게이트웨이 정보 등 이더넷 정보를 설정합니다.

그림 3.3 IP 주소 설정 화면
(4) 입출력 데이터 크기 및 통신 에러 발생시 입력 데이터 처리 옵션을 설정합니다.

그림 3.4 I/O 설정 화면
n 통신 에러 시 입력:
EtherNet/IP 통신 에러 발생시 입력 데이터(FB3.X)의 처리 옵션입니다. Clear로 설정하게 되면 통신 에러 발생시 0으로 모든 입력 데이터가 클리어 되며, Hold로 설정하게 되면 통신 에러 발생시 마지막 유효한 값을 유지 하게 됩니다.
n I/O 크기:
EtherNet/IP Scanner 기준으로 입출력 데이터 크기를 설정합니다. 로봇 제어기 기준에서는 입력은FB3.Y에 해당되며 출력은 FB3.X에 해당됩니다. 참고로 입출력 크기의 디폴트 값은 120Byte입니다.
(5) EtherNet/IP Adapter 기능을 사용하기 위해서는 On으로 위치시킨 후 적용 또는 완료 버튼을 클릭합니다.

그림 3.5 기능 On/Off 설정 화면
* 참고:
EtherNet/IP 어댑터 설정이 변경되었을 경우 새로운 설정 값 적용을 위해 기능 리셋 (Off → On) 또는 로봇 제어기 재부팅이 필요합니다.