2.1. 시스템 설정
2.1. 시스템 설정
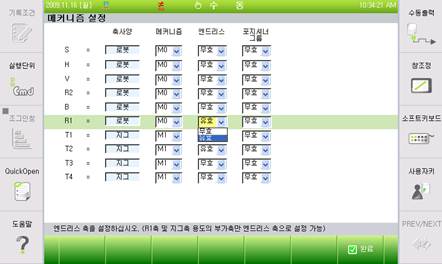
(1) 『[F2]: 시스템』 → 『5: 초기화』 → 『6: 메커니즘 설정』메뉴에서 엔드리스 축을 설정합니다. 엔드리스 축으로 사용하고자 하는 축을 엔드리스 ‘유효’로 설정을 변경합니다. 엔드리스 축은 축 사양에 따라 선택이 가능하지 않을 수 있습니다.
(2) 축 사양이 ‘로봇’인 경우 ‘R1’축이 엔드리스 축으로 설정이 가능하고, 또한 ‘지그’인 경우에 엔드리스를 유효로 설정할 수 있습니다.
(3) 설정이 완료되었으면 『[F7]: 완료』키를 누릅니다.
(4) 전원을 재 투입하면 엔드리스 축 설정이 적용됩니다.
< 주의사항 >
① 본 기능은 전원을 재투입할 때 엔드리스 축에 대해서 -180~180deg로 자동으로 환산하여 축의 위치를 변경합니다.
② 백업된 파일로(ROBOT.CON, ROBOT.MCH와 같은 정수파일들) 제어기를 복구하고자 할 때에는 엔드리스 축의 물리적인 위치는 복구할 수 없으므로, 엔코더 옵셋 및 축정수 위치를 다시 설정하여 주십시오.