4.4. 이더넷 통신 문제해결
4.4. 이더넷 통신 문제해결
RS-232C 통신과 관련하여 정상적인 동작이 안될 때에는 [그림 4.25], [그림 4.26]와 같이 윈도우의 명령 프롬프트 창을 열어, 로봇제어기의 IP주소에 대해 ping 명령을 실행합니다.
시험 결과에 따른 결론은 [표 4-4]와 같습니다.
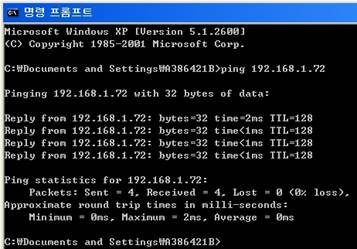
그림 4.25 로봇제어기로부터 ping 응답이 있는 경우의 예
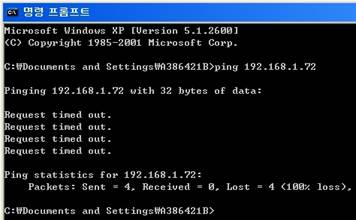
그림 4.26로봇제어기로부터 ping 응답이 없는 경우의 예
표 4‑4 로봇제어기에 대한 ping 시험결과
결과 | 결론 (추정 가능한 원인들) |
Reply from{IP주소}가 출력됨. 즉, 로봇제어기로부터 ping 응답이 있음. | 로봇제어기와 PC간 이더넷 연결은 정상적이나, 다른 원인으로 통신이 안됨. - HRLadder의 통신설정 잘못 - 로봇제어기 모니터링 서비스 오류 → HRLadder와 로봇제어기를 함께 껐다 켜 볼 것. - 윈도우 방화벽에 의한 HRLadder용 서비스의 금지 → 윈도우 방화벽의 예외 프로그램 목록에 HRLadder를 포함시킴. (제어판 - 보안센터 - Windows 방화벽 - 예외 탭) |
Request timed out이 출력됨. 즉, 로봇제어기로부터 ping 응답이 없음. | ▶ 해당 PC로 인터넷이나 LAN 접속에 문제가 있는 경우: → PC의 이더넷 기능 불량. PC에 대해 점검을 의뢰 |
▶ 해당 PC로 인터넷이나 LAN 접속에 문제가 없는 경우: - IP 주소 설정 잘못. 혹은 서브넷 불일치.
- 로봇제어기 - PC간 이더넷 케이블 연결 잘못. (케이블 단선, 케이블 제작 잘못 등) - (허브사용시) 허브 고장. 전원상태 불량 → LAN 테스터기로 케이블 점검/교체.
- 로봇제어기 캐비넷 내부의 이더넷 케이블 단선 혹은, 제어기 메인보드의 이더넷 기능 불량 → 당사에 A/S 센터로 문의 |