2.3.2. 인터럽트 번호(_INT.TARGET)
2.3.2. 인터럽트 번호(_INT.TARGET)
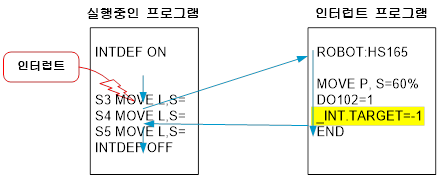
설명 | 목표 위치의 도달 상태를 관리합니다. 예를 들어 로봇이 이동 중 인터럽트 조건을 만족한 경우에는 호출 프로그램의 실행이 종료된 후 이전 실행하던 프로그램의 위치로 되돌아 올 때 이 위치를 조정하여 사용할 수 있습니다. |
문법 | _INT.TARGET=1 (-1, 0, 1) |
사용 예 | _INT.TARGET=-1 ‘ 목표 위치에 미 도달 _INT.TARGET=0 ‘ 목표 위치와 일치 _INT.TARGET=1 ‘ 목표 위치를 지나침 |
예) _INT.TARGET=-1
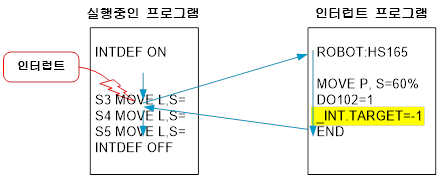

예) _INT.TARGET=1 or 0