2.1. 시스템 초기화
2.1. 시스템 초기화
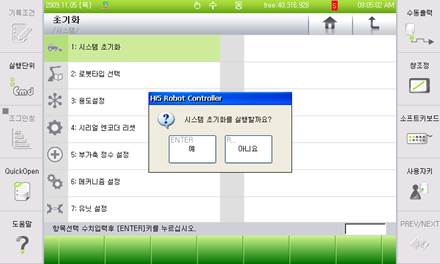
(1) 제어기를 처음으로 설정하는 경우에는 시스템 초기화를 합니다. 『[F2]: 시스템』 → 『5: 초기화』 → 『1: 시스템 초기화』에 다음과 같은 메뉴가 제공됩니다. 시스템 초기화를 선택하고 YES키를 누릅니다.
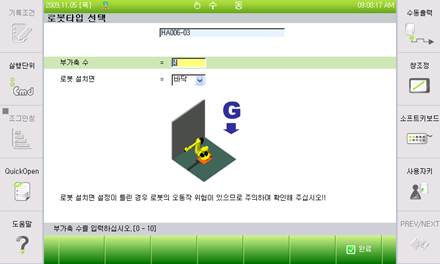
(2) 시스템 초기화 이후에는 로봇 타입을 선택합니다. 로봇 타입을 선택하면 다음 화면이 나타납니다. 이 때 사용할 총 부가축의 개수를 입력합니다. 또한 로봇의 설치 면을 설정합니다. 설정이 완료되면 『[F7]: 완료』 키를 누릅니다.
(3) 다음으로 ‘부가축 정수를 설정할까요?’메시지가 나오면 YES키를 누릅니다. 다음 화면으로 이동합니다. 이 화면에서 포지셔너에 해당하는 부가축은 축 사양을 포지셔너로 설정하고 해당하는 파라미터를 설정합니다. 당사가 제공하는 포지셔너가 아닌 경우에는 축 구성을 ‘임의’로 설정하고 나머지 파라미터를 설정합니다. 부가축 파라미터 설정 방법은 ‘부가축 기능사용설명서’를 참고하십시오.
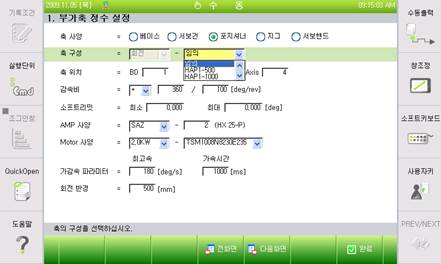
(4) 만약 당사에서 제공하는 포지셔너인 경우에는 축 구성해서 해당 목록을 선택하십시오. 이 경우에는 다른 파라미터를 설정할 필요가 없습니다.

(5) 『[F2]: 시스템』 → 『5: 초기화』 → 『6: 메커니즘 설정』메뉴에서 포지셔너 그룹을 설정합니다. 아래의 그림과 같은 경우는 T1, T2축은 2축 포지셔너로 그룹 1이고 T3축은 1축 포지셔너로 그룹2, 마지막으로 T4축은 1축 포지셔너로써 그룹 3으로 설정한 경우입니다. 메커니즘 설정을 통상적으로 포지셔너 그룹과 동일하게 설정하는 것이 편리 합니다.

(6) 전원을 재 투입하면 메커니즘과 포지셔너 그룹이 정상적으로 적용됩니다.