3.2. 포지셔너의 접속/분리 작업 예
3.2. 포지셔너의 접속/분리 작업 예
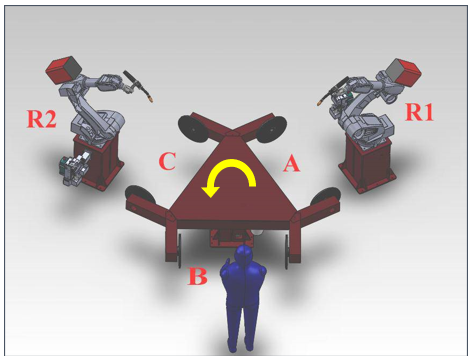
그림 3.1 로봇 2대, 포지셔너 3대 예시
(1) 포지셔너 체인지 시스템의 구성
- 시스템 구성: 로봇2대 + 포지셔너 3대
- 필요 장비: 각 포지셔너와 각각의 로봇을 연결할 수 있는 ATC(Auto Tool Changer)
당사 로봇의 서보건 체인저
(2) 작업 내용
- 로봇 1이 포지셔너A와 접속 후 작업 수행. 로봇 2는 포지셔너 C와 작업 수행. 작업자는 포지셔너B에 작업물 장착
- 각 포지셔너 별 작업이 종료되면 로봇과 포지셔너 간 접속을 끊음.
- 3 부분의 작업이 완료된 후 전체 포지셔너 시스템이 반시계방향으로 120도 회전.
- 로봇 1이 포지셔너B와 접속 후 작업 수행. 로봇 2는 포지셔너 A와 작업 수행. 작업자는 포지셔너C에 작업물 장착
- 이후 작업 반복 수행
(3) 주의 사항
- 각 포지셔너의 분리/접속 기능 동작은 가능한 한 동일한 위치에서 수행하십시오.