1.2. 티치펜던트 공유기능에 대해서
1.2. 티치펜던트 공유기능에 대해서
티치펜던트 공유기능이란 하나의 티치펜던트(TP510)를 여러 대의 Hi5 로봇제어기 본체에 연결하여 공용으로 사용하는 기능입니다. 여기서 로봇제어기는 실제의 Hi5제어기일 수도 있고, PC상의HRSpace3 소프트웨어에 불러놓은 가상의 Hi5제어기일 수도 있습니다. 이 기능의 목적은 크게 2가지입니다.
n 로봇 협조제어 시스템의 일괄 조작
n HRSpace3의 가상 티치펜던트 대신 실제 티치펜던트를 사용
본 매뉴얼은 이 중 1번째 항목에 대해서만 설명합니다. 2번째 항목에 대해서는 HRSpace3 기능설명서의 “7.4절 실제 티치펜던트 (RTP; Real Teach Pendant)”을 참고하십시오. |
(1) 로봇 협조제어 시스템의 일괄 조작
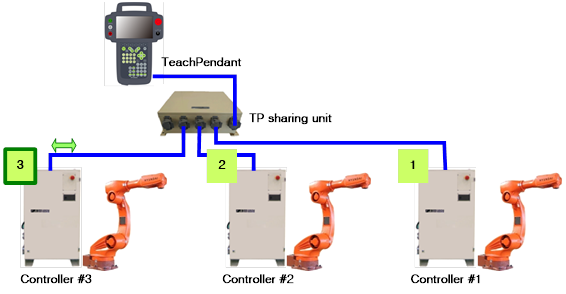
협조제어 시스템 조작 시, 동기적으로 연결된 여러 대의 협조제어 로봇들을 번갈아 가며 조작하거나 한꺼번에 조작해야 하는데, 각각의 제어기에 연결된 티치펜던트를 사용하는 것 보다는 하나의 티치펜던트로 전체 시스템을 조작하는 것이 편리합니다.
이 기능을 사용하기 위해서는 이더넷 허브와 비상정지, 인에이블 스위치 배선을 포함하고 있는 TP 공유기를 필요로 하며, 각 로봇제어기에 대한 ID를 할당하는 준비과정이 있어야 합니다.
(2) HRSpace3의 가상 티치펜던트 대신 실제 티치펜던트를 사용
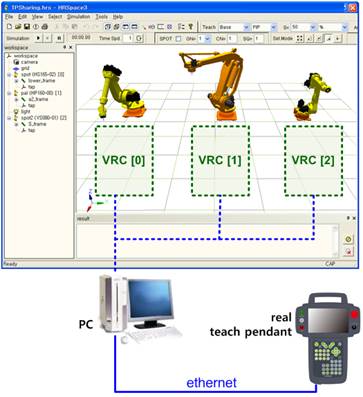
현대로봇 시뮬레이션 소프트웨어인 HRSpace3는 Hi5 가상제어기(VRC: Virtual Robot Controller)와 가상 티치펜던트를 내장하고 있습니다. 가상 티치펜던트는 실제의 티치펜던트와 거의 같지만, 마우스로 키패드를 클릭하는 방식이기 조작이 불편하고 실제감이 떨어집니다. 또한, PC 화면을 크게 점유하기 때문에 HRSpace3 사용에도 다소 방해가 됩니다.
티치펜던트 공유기능을 사용하면 실제 티치펜던트를 PC에 이더넷으로 연결해 사용할 수 있습니다. PC화면을 점유하지 않는 장점이 있으며, 실제 티치펜던트의 숙련자라면 HRSpace3의 조작속도도 빨라집니다. 로봇 현장 같은 실제적인 조작감을 제공하므로, 현대로봇의 사용자 교육에도 유용합니다. HRSpace3 내에 로봇 모델이 여러 개인 경우에도 원하는 로봇에 연결해가며 조작할 수 있습니다.