3.1.2. Manipulation Buttons
3.1.2. Manipulation Buttons
조작버튼은 HRVision 3D-MultiCam 의 주요기능을 조작하는 버튼으로 각 기능은 다음과 같습니다.

n Settings
| 각종 기능 및 연동 HW를 설정/관리하는 메뉴입니다. 카메라, 노출, 차종, 통신 등 다양한 기능을 설정합니다. |

- Camera
| 카메라 모델, 비디오 포멧 등을 설정합니다. |

프레임 그래버(Frame Grabber)와 아날로그 카메라를 사용하는 경우 아래와 같은 화면이 나타납니다.
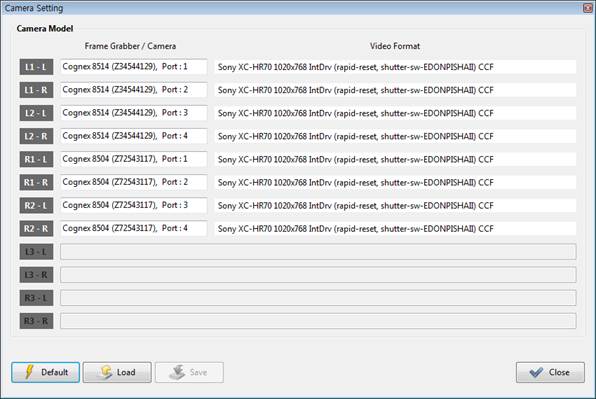
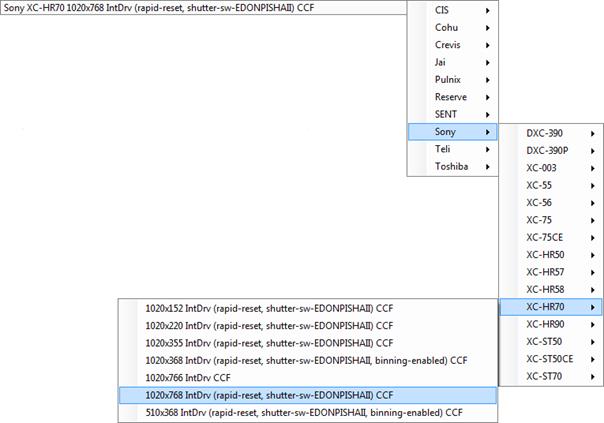
사용하고자 하는 카메라 모델과 비디오 포멧 등을 변경하고자 할 경우에는, 아래의 화면과 같이 원하는 항목을 메뉴에서 선택할 수 있습니다.
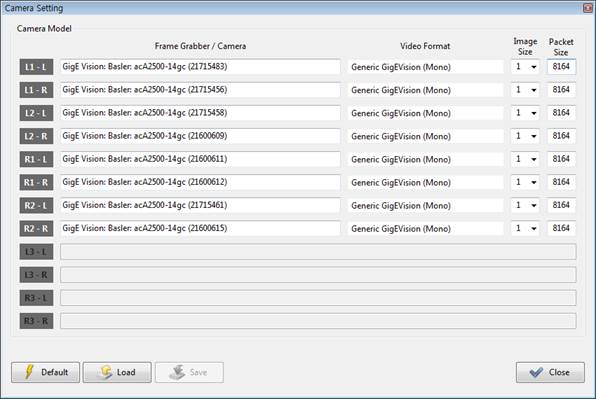
GigE 디지털 카메라를 사용하는 경우 아래와 같은 화면이 나타납니다.
비디오 포멧, 영상의 크기 (Image Size), 패킷의 크기 (Packet Size)를 변경할 수 있습니다.
영상의 크기(Image Size)는 1과 1/2을 선택할 수 있습니다. 1을 선택한 경우에는 카메라 자체의 해상도로 영상을 획득하고 1/2을 선택한 경우에는 카메라 해상도를 1/2로 줄여 영상을 획득합니다. 1/2로 선택하더라도 카메라에서 이 기능을 지원하지 않으면 영상은 카메라 자체의 해상도로 획득됩니다.
패킷의 크기(Packet Size)를 줄여주면 영상 데이터가 PC에 전송되는 속도는 느리나 안정적이 되고, 늘리면 전송 속도는 빠르나 네트워크 환경에 따라 불안정해 질 수 있습니다. 네트워크 환경(PC 사양, 스위칭 허브, 이더넷 카드 등)이 GigE 디지털 카메라의 영상 데이터를 전송하기에 충분하지 못하면 패킷의 크기를 줄이시기 바랍니다.
12대의 카메라를 사용하는 경우에는L3-L, L3-R, R3-L, R3-R 카메라도 선택할 수 있습니다.
사용하고자 하는 카메라 모델과 비디오 포멧 등을 변경하고자 할 경우에는, 아래의 화면과 같이 원하는 항목을 메뉴에서 선택할 수 있습니다.

- Exposure
| 카메라의 노출값을 설정합니다. |

아래 그림과 같이 등록 노출 (Registered Exposure)을 선택하면 패턴 등록 시에 사용했던 노출 값이 읽기 전용으로 나타납니다. 메인 화면의 Exposure ( ) 버튼에서 ‘Registered Exposure’를 선택하면 이 노출 값이 사용됩니다.
) 버튼에서 ‘Registered Exposure’를 선택하면 이 노출 값이 사용됩니다.

사용자 노출 (User Exposure)을 선택하면 각 차종과 각 카메라의 노출 값을 다시 설정할 수 있습니다. 메인 화면의Exposure () 버튼에서 ‘User Exposure’를 선택하면 이 노출 값이 사용됩니다.
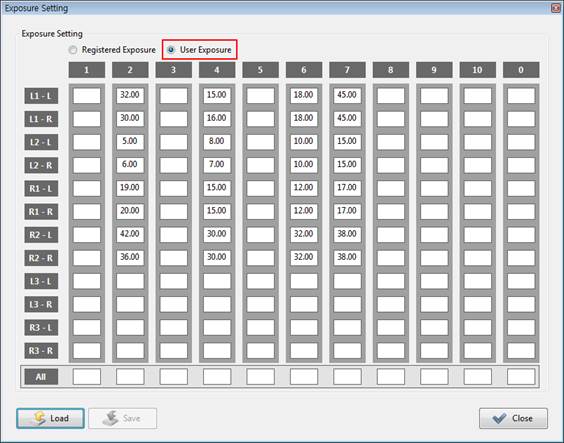
차종과 상관 없이 현재의 노출 값을 바꾸려면 ‘0번 차종’의 노출 값을 변경하면 됩니다. 메인 화면에서 차종(Model)을 ‘0’으로 입력하거나 아무것도 입력하지 않을 경우 이 노출 값이 사용됩니다.
- Model
| 차종 이름을 입력합니다. |

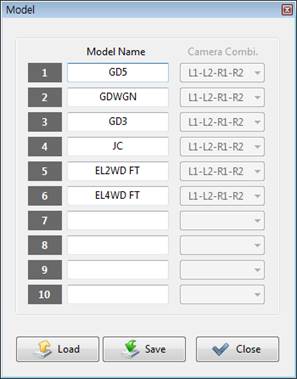
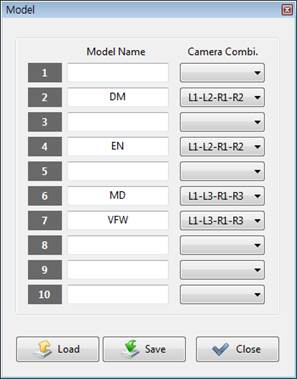
Model Name란에 차종 이름을 입력합니다.
측정 지점이 L1, L2, R1, R2의 4군데일 경우에는 카메라 조합(Camera Combi.) 항목이 비활성화되며 따로 선택하실 필요가 없습니다.
측정 지점이 L1, L2, R1, R2, L3, R3의6군데일 경우에는 차종 별로 측정할 카메라 조합을 선택해 주어야 합니다. 카메라 조합(Camera Combi.) 항목에서 L1-L2-R1-R2의 조합으로 사용할 것인지 L1-L3-R1-R3의 조합으로 사용할 것인지 선택할 수 있습니다.
아래의 왼쪽 그림은 측정 지점이 4 군데 일 때 나타나는 화면의 예이며, 아래의 오른쪽 그림은 측정 지점이 6군데 일 때 나타나는 화면의 예입니다.
- Reference Points
| 측정한 차체의 위치를 기준위치로 등록합니다. |

등록하고자 하는 차종 번호(Model)가 입력되지 않은 상태에서 본 메뉴를 선택하면 아래와 같은 메시지 창이 나타납니다.

이 경우 아래와 같이 메인 화면의 Model 칸에 차종 번호를 입력하십시오.

L1, L2, R1, R2, L3, R3의 6군데에서 측정하는 경우, 측정하고자 하는 카메라 조합이 정의되어 있지 않은 경우 아래와 같은 메시지 창이 나타납니다. Settings – Model 메뉴에서 측정하고자 하는 카메라 조합(Camera Combi.)을 선택하십시오.

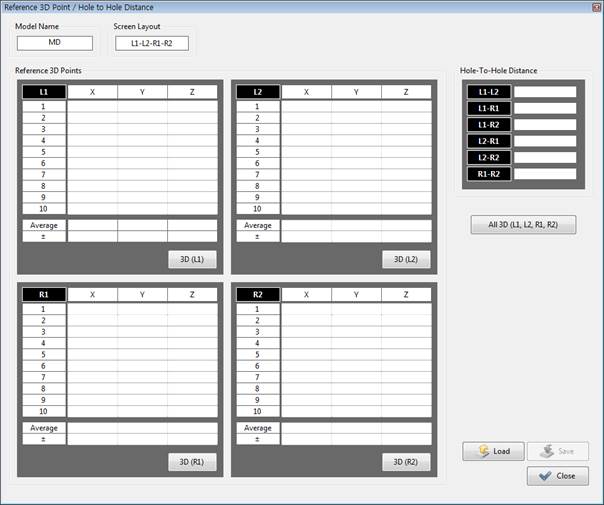
아래와 같은 화면이 나타나면 각 지점에 해당하는 “3D” 버튼을 누르십시오. 그 지점에 해당하는 3차원 좌표가 측정됩니다. 계속 누르면 측정된 3차원 좌표의 평균값과 반복 정밀도가 자동으로 계산됩니다.
특정 카메라에 패턴이 되어 있지 않은 경우에는 아래와 유사한 메시지 창이 나타납니다. 이 경우 3차원 측정을 하기 전에 해당 카메라의 패턴 등록을 먼저 수행하십시오.

“All 3D” 버튼을 누르면 모든 지점에 해당하는 3차원 좌표가 측정되며, 계속 누르면 모든 지점에서의 평균값과 반복 정밀도가 자동으로 계산됩니다.
패턴 인식이 제대로 되지 않는 경우 반복 정밀도의 값이 크게 나타납니다. 이 경우 패턴 등록을 다시 하시기 바랍니다.
- Communication : Serial (RS-232)
| 로봇과의 데이터 전송을 위해 시리얼 (RS-232) 통신을 사용합니다. |

시리얼(RS-232) 통신을 이용하여 PC와 로봇 사이에 데이터를 전송하려면 아래의 그림과 같이 COM Port, Baud Rate, Data Bits, Parity, Stop Bits 항목을 설정해주어야 합니다.
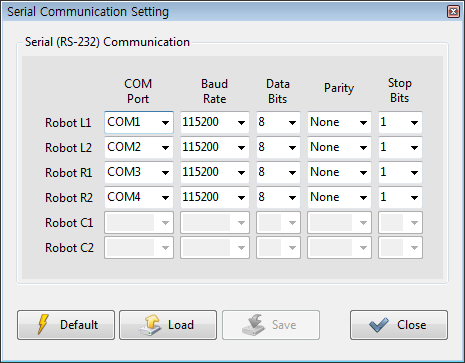
시리얼 통신 설정이 잘못된 상태에서 (예를 들면, 동일한 COM Port가 여러 로봇에 사용되는 경우), “Save”버튼을 누르면 아래의 그림과 같은 메시지 창이 나타납니다.

마찬가지로 시리얼 통신 설정이 잘못된 상태에서 “Close”버튼을 누르면 아래의 그림과 같은 메시지 창이 나타납니다.

이 경우 시리얼 통신 설정을 다시 한번 확인하시기 바랍니다.
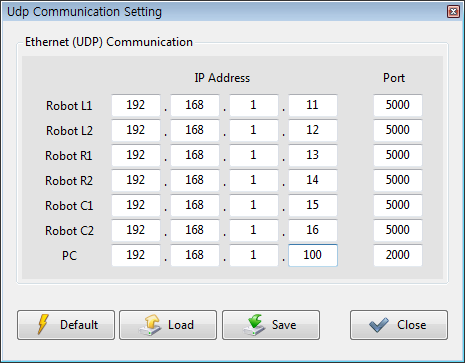
- Communication : Ethernet (UDP)
| 로봇과의 데이터 전송을 위해 이더넷 (UDP) 통신을 사용합니다. |

이더넷 (UDP) 통신을 이용하여 PC와 로봇 사이에 데이터를 전송하려면 아래의 그림과 같이 Robot의 IP와 통신 포트, PC의 IP와 통신 포트 항목을 설정해주어야 합니다. Robot의 IP Address는 각 로봇 제어기의 IP 주소를 입력하시면 되고, PC의 IP Address는 현재 사용하고 있는 PC의 IP 주소를 입력하시면 됩니다. Robot과 PC의 Port는 사용자가 임의로 지정하시면 됩니다.
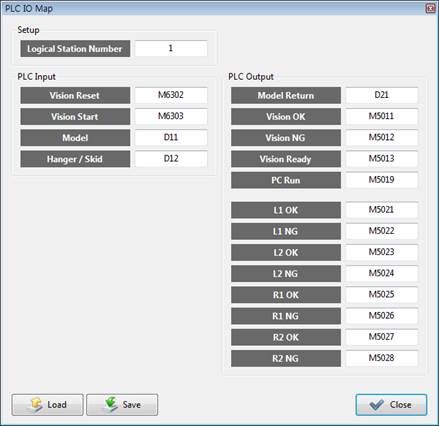
- PLC : Mitsubishi
| Mitsubishi (MELSEC) PLC를 사용합니다. |

Mitsubishi (MELSEC)의 PLC를 이용하기 위해서는 아래의 I/O를 PLC 에 맞게 설정해 주어야 합니다.
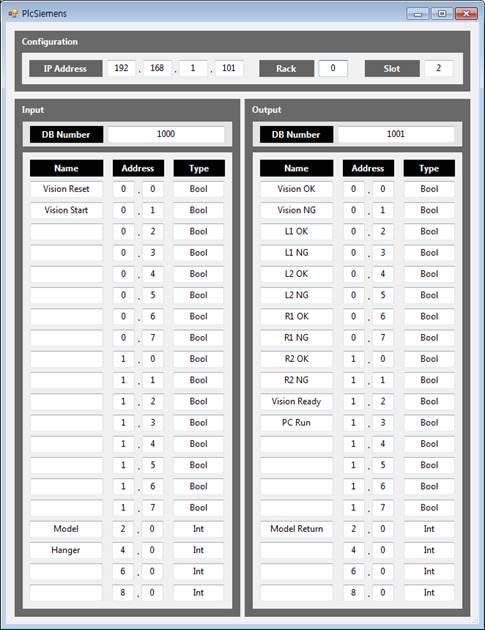
- PLC : Siemens
| Siemens PLC를 사용합니다. |

Siemens의 PLC를 이용하기 위해서는 아래의 I/O를 PLC 에 맞게 설정해 주어야 합니다.
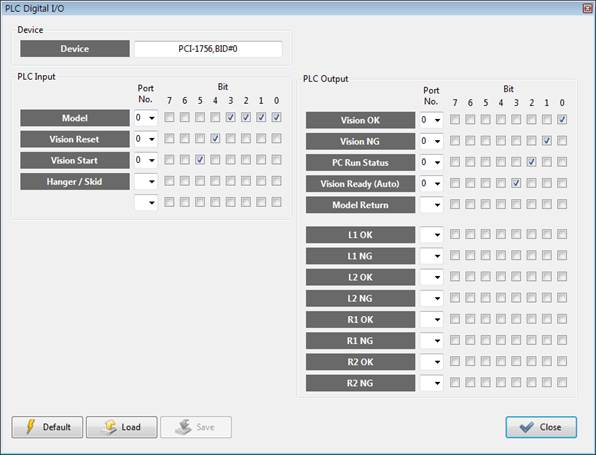
- PLC : Digital I/O
| Digital I/O 보드를 이용하여 PLC를 사용합니다. |

Advantech의 Digital I/O 보드로 PLC를 이용하기 위해서는 아래의 I/O를 PLC에 맞게 설정해 주어야 합니다.
- PLC : Non-Use
| PLC를 사용하지 않습니다. |

- Search Mode : Quick
| 패턴을 빠르게 탐색합니다. |

“Quick”모드를 선택하면 기본적인 패턴 탐색 방법을 사용합니다. “Accurate”모드를 선택했을 때 보다 속도가 약간 빠릅니다. 패턴의 원점을 원형 홀의 중심으로 잡은 경우에는 정확도 향상을 위해 “Accurate”모드를 사용하시기를 권장합니다.
- Search Mode : Accurate
| 패턴을 정확하게 탐색합니다. |

“Accurate”모드를 선택하면 기본적인 패턴 탐색 후에 타원 적합(Fitting)을 통해 원형 홀의 중심을 한번 더 정확하게 추정합니다. 패턴에 원형 홀이 없는 경우, 패턴의 원점을 원형 홀의 중심으로 잡지 않은 경우, 혹은 주변 환경에 따라 원형 홀이 제대로 검출되지 않는 경우에는 “Quick”모드를 사용하시기 바랍니다.
- Auto 3D Correction : Use
| 측정된 3차원 데이터를 자동 보정합니다. |

“Use”를 선택하면 측정된 3차원 데이터를 보정하여 출력합니다. 각 카메라에서 측정된 데이터의 품질을 계산하여 측정 오차가 최소화되도록 자동 보정합니다.
- Auto 3D Correction : Non-Use
| 측정된 3차원 데이터를 보정하지 않습니다. |

“Non-Use”를 선택하면 측정한3차원 데이터를 보정하지 않고 그대로 출력합니다. “Use”를 권장합니다.
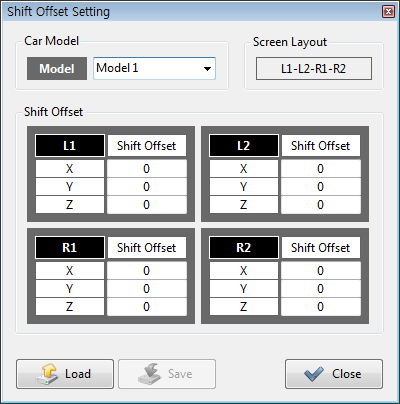
- Shift Offset
| 측정한 3D 데이터의 값을 임의로 이동(Shift)시킵니다. |

측정된 3차원 데이터의 값이 일정량만큼 한쪽으로 치우쳤을 때, 이를 사용자가 임의로 이동(Shift)시켜 보정합니다. 예를 들어, L1에서 측정된 3차원 데이터가 X방향으로 +10mm 만큼 치우쳐진다면, L1의 X 칸에 -10mm을 입력하여, 그 값을 보정합니다.
카메라의 위치가 틀어져 3차원 데이터의 값이 특정 위치로 치우쳐지는 경우, 응급 조치로 Shift Offset 기능을 사용할 수 있습니다만, 일반적으로는 본 기능을 사용할 일은 없습니다.
만약, 3차원 데이터의 값이 계속해서 잘못 측정이 되는 경우 공급자에게 문의하십시오.
- Vibration Detection
| 차체의 진동을 검출합니다. |

카메라로 차체의 3차원 위치를 측정하기 전에, 차체의 진동을 검출합니다. 진동 검출에 사용할 카메라 및 진동 검출 변수를 설정합니다.
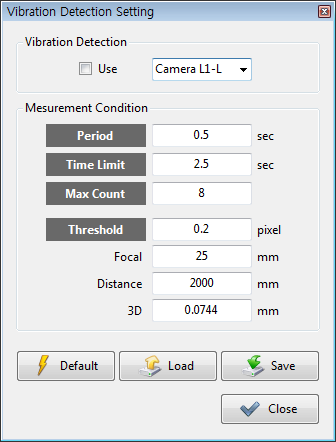
“Use”에 체크를 하면 선택한 카메라로 진동 검출 기능을 사용합니다.
“Period”는 측정 주기입니다. 예를 들어 0.5sec로 설정되어 있으면 0.5초마다 측정합니다.
“Time Limit”은 측정 시간입니다. 예를 들어 2.5sec로 설정되어 있으면 2.5초간 측정합니다.
“Max Count”는 최대 측정 횟수입니다. 예를 들어 8로 설정되어 있으면 최대 8번 측정합니다.
“Time Limit” 혹은 “Max Count” 중 하나라도 만족하면 측정을 멈춥니다.
“Threshold”는 같은 점을 측정했을 때 화면에서 흔들린 화소(Pixel)량을 설정합니다. 0.2가 기본 값입니다.
일반적으로 본 기능을 사용하실 필요는 없으나, 공장이 심하게 흔들리는 환경이라면 사용하시기 바랍니다.
- Limit
| 3D 데이터의 오차 한계를 설정합니다. |

아래의 그림에서 “Moving Distance Limit”은 측정된 홀이 공간상에서 이동할 수 있는 한계 거리를 나타내며, “Hole-to-Hole Distance Error”는 홀간 거리의 오차 임계값을 나타냅니다.
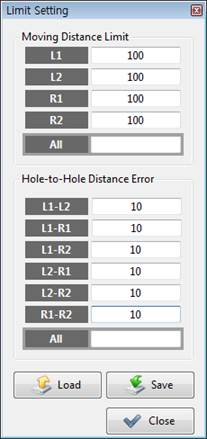
만약 차체의 3D 위치가 기준 차체보다 “Moving Distance Limit”이상 이동하면 NG가 출력되며, 홀간의 거리도 기준차체보다 설정 값 이상 차이가 나도 NG가 출력됩니다.
차체에 같은 패턴만 반복적으로 나타나는 경우 (예를 들어 같은 크기의 원형 홀만 여러 개 보이는 경우), 카메라에서 어떤 패턴이 올바른 패턴인지 알기 어려운 경우가 있습니다. L1, L2 모두 다른 패턴(홀)을 인식 한 경우 홀간의 간격은 그대로인 상태에서 홀의 이동 거리만 많은 경우가 있습니다. 차체의 위치가 특정 범위 이상 변화하지 않는다는 정보를 알고 있으면, 그 범위 (Moving Distance Limit)를 초과하는 3차원 데이터는 잘못된 데이터라는 것을 알 수 있습니다.
혹은 A차종과 B차종의 홀 간의 거리는 유사한데, 차종 인식이 잘못되어 잘못된 차종을 찾으라는 명령이 입력될 경우 “Hole-to-Hole Distance Error”만으로는 차종이 잘못되었다는 것을 알 수 없습니다. 이 경우 A차종과 B차종의 홀의 위치가 다른 경우 “Moving Distance Limit”을 설정해두면 차종이 잘못 입력되었다는 것을 알 수 있습니다.
- Password
| Password 변경을 수행합니다. |

제일 먼저 현재의 비밀 번호를 입력하십시오. 그리고 그 다음 칸에 새로운 비밀번호를 입력하고, 제일 아래칸에 새로운 비밀번호를 한번 더 입력하십시오.

만약 현재 비밀번호가 잘못된 경우 아래와 같은 메시지 창이 뜹니다.

새로운 비밀번호 두 개가 같지 않으면 아래와 같은 메시지 창이 뜨고 비밀번호는 변경되지 않습니다. 변경하고자 하는 비밀번호가 올바른지 다시 한번 확인하시기 바랍니다.

- File Management
| 데이터의 저장 기간 및 삭제 시간을 설정합니다. |

프로그램 수행 도중 저장된 OK/NG 영상 및 다양한 데이터의 저장 기간 및 삭제 시간을 설정합니다.
데이터 삭제는 시스템에 많은 부하를 줄 수 있으므로, 로봇이 작업을 하지 않는 새벽으로 삭제 시간을 설정하는 것을 권장합니다. 기본적으로 30일이 지난 데이터를 새벽 4시에 삭제합니다.

- Screen Layout
| 화면 배치를 변경합니다. |

공정의 로봇 및 카메라 배치에 따라 HRVision 3D MultiCam 프로그램의 Image Display Window 과 Output Window 의 배치를 변경합니다. 측정 지점이 4군데일 경우 아래의 왼쪽과 같이 총 4가지의 화면 배치 중 하나를 선택할 수 있습니다. 측정 지점이 6군데일 경우 아래의 오른쪽과 같이 총 8가지의 화면 배치 중 하나를 선택할 수 있습니다.


“L1-L2-R1-R2”를 선택했다면, 아래의 화면과 같이 왼쪽 위는 L1, 오른쪽 위는 L2, 왼쪽 아래는 R1, 오른쪽 아래는 R2로 화면이 배치됩니다. Output Window도 같은 순서로 배치됩니다.
n Calibration
| 카메라 캘리브레이션 프로그램 로딩 및 로봇과 카메라와의 관계를 계산합니다. |

- Camera Calibration
3.2.1의 카메라 캘리브레이션 프로그램이 로딩되며, 카메라의 투영행렬을 계산합니다.
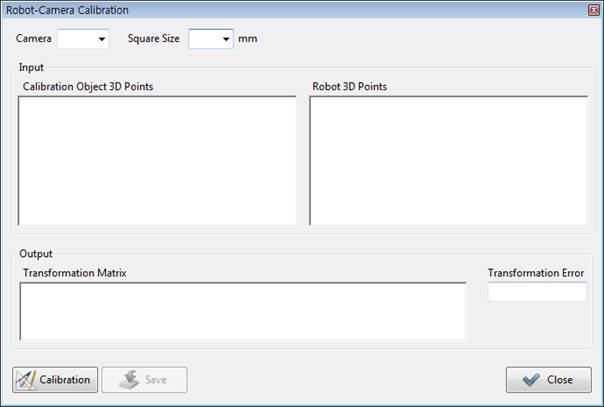
- Robot-Camera Calibration
카메라 캘리브레이션을 위해 사용한 보정판과 로봇과의 관계를 계산합니다.
n Grab
| 클릭할 때마다 카메라에 보여지는 영상을 하나씩 획득합니다. |

n Live
| 설치된 카메라로부터 연속영상이 보여집니다. |

n Exposure
| 3가지 종류의 노출 모드 중 하나를 선택할 수 있습니다. |

- Registered Exposure
| 패턴 등록시에 사용된 노출로 영상을 획득합니다. |

- Auto Exposure
| 패턴 등록시의 영상의 밝기와 현재 영상의 밝기가 유사하도록 노출을 자동으로 변경합니다. 자동 노출 모드를 사용하실 것을 권장합니다. |

- User Exposure
| 사용자가 설정한 노출로 영상을 획득합니다. 사용자 노출은 “Settings - Exposure”에서 각 차종 별, 각 카메라 별로 설정하실 수 있습니다. |

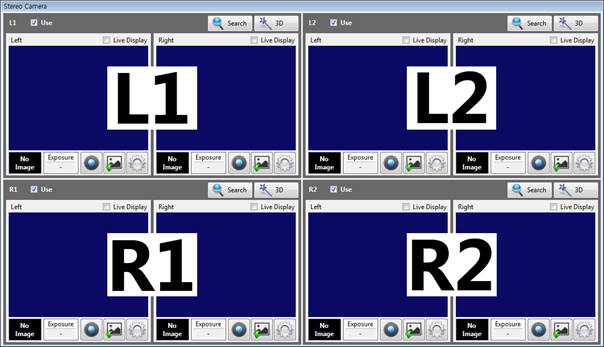
n Search
| 영상을 획득한 후 패턴 인식 작업을 수행합니다. |

카메라 캘리브레이션을 수행하기 전에 모든 카메라에서 패턴 등록이 제대로 되었는지, 패턴 인식이 잘 되었는지 확인하기 위해 본 버튼을 사용합니다.
차종이 입력이 되어 있지 않은 상태에서 “Search”버튼을 누를 경우 아래와 같은 메시지 창이 나옵니다.

이 경우 아래와 같이 메인 화면의 Model 칸에 차종 번호를 입력하십시오.
만약 패턴 등록되어 있지 않을 경우, Status 창에 아래와 같은 에러 메시지가 나타납니다. 이 경우 패턴 등록을 먼저 수행하십시오.

패턴이 등록되어 있을 경우, 패턴 인식 결과가 화면에 나타납니다.
n 3D
| 차체의 3차원 위치 값을 계산합니다. |

모든 측정 지점에서 3차원 위치 값이 올바르게 계산되는지 확인하기 위해 본 버튼을 사용합니다.
차종이 입력이 되어 있지 않은 상태에서 “3D”버튼을 누를 경우 아래와 같은 메시지 창이 나타납니다.
이 경우 아래와 같이 메인 화면의 Model 칸에 차종 번호를 입력하십시오.
특정 카메라의 캘리브레이션이 되어 있지 않은 경우 아래와 유사한 메시지 창이 나타납니다. 이 경우 카메라 캘리브레이션을 먼저 수행하십시오.

로봇과 카메라 사이의 관계가 캘리브레이션이 되어 있지 않은 경우 아래와 유사한 메시지 창이 나타납니다. 이 경우 로봇과 카메라 사이의 관계를 먼저 캘리브레이션 하십시오.

모든 선행 과정이 완료되었을 경우 영상 획득, 패턴 인식, 3차원 위치 계산이 순차적으로 수행되며 3차원 위치 측정 결과가 출력됩니다.
n Disp. Option
| 패턴 인식 혹은 3D 위치 계산 후 영상 창에 표시되는 결과 출력 데이터의 표시 유무를 결정합니다. |

- Score
| 패턴인식 결과를 점수로 표시합니다. |

- Origin
| 인식된 패턴의 원점을 표시합니다. |

- Coordinate Axes
| 인식된 패턴의 좌표축을 표시합니다. |

- Pattern Region
| 인식된 패턴의 영역을 표시합니다. |

- Hole
| 원형 홀을 등록한 경우 검출된 원형 홀을 표시합니다. |

- Search Region
| 패턴 탐색 영역을 표시합니다. |

- Origin (Reference)
| 기준 차체의 패턴의 원점을 표시합니다. |

- Coordinate Axes (Reference)
| 기준 차체의 패턴의 좌표축을 표시합니다. |

- Pattern Region (Reference)
| 기준 차체의 패턴의 영역을 표시합니다. |

- Center and Scale Results
| 패턴 원점과 기준 차체 대비 상대적 크기를 수치로 표시합니다. |

- Center Guide Line
| 영상의 가운데에 십자선을 표시합니다. |

n Load Pattern
| 등록된 패턴을 로딩합니다. |

n Save Image
| 현재 전체 화면과 개별 카메라의 영상을 “C:*HRVision MultiCam*Image” 폴더에 저장합니다. |

n Database
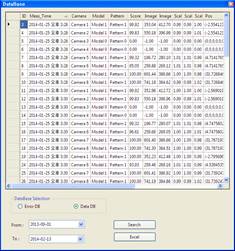
| 측정한 데이터 베이스 검색 창을 표시합니다. |

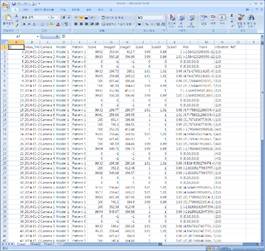
측정한 데이터 베이스의 검색 창을 표시합니다. 검색된 데이터는“Microsoft Excel” 프로그램과 연동하여 표시 가능합니다.
n Manual / Auto
| Manual/Auto 모드를 변경합니다. |

Manual/Auto 모드를 변경합니다. Manual에서 Auto 모드로 변경 시에는 파일에 저장된 모든 데이터를 다시 불러옵니다. 데이터를 불러오는 동안 “Manual”이라는 글자가 “Loading”로 변경되며, 완료 후 다시 “Auto”로 변경됩니다. “Auto”모드 에서는 영상획득의 제외한 모든 버튼이 조작 불가능하며 PLC 및 로봇과의 통신만을 통해서 조작이 됩니다.