3.2.1. 스테레오 카메라 캘리브레이션 기능
3.2.1. 스테레오 카메라 캘리브레이션 기능
카메라 좌표계와 공정의 공통 좌표계를 일치시키는 카메라 캘리브레이션을 수행하는 과정입니다.
HRVision 3D-MultiCam은 다음과 같은 보정판을 이용하여 캘리브레이션을 수행합니다.

상기 보정판을 스테레오 카메라의 시각영역 내부에 위치하도록 배치시킨 후, 스테레오 영상을 획득 합니다. 획득된 스테레오 영상들은 “C:*HRVision MultiCam*Image” 폴더에 저장됩니다.
HRVision 3D-MultiCam 메뉴의 “Calibration” 메뉴에서 “Camera Calibration” 메뉴를 클릭하면, 다음과 같은 “Hyundai Heavy Industry Stereo Camera Calibration Program”(이하 Calibration Program)이 수행됩니다.
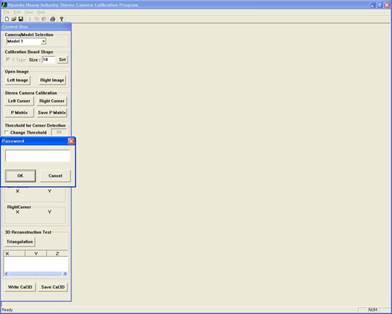
“Calibration Program”은 암호를 정확히 입력해야만 기능을 사용할 수 있습니다. 암호는 HRVision 3D-MultiCam SW를 구매하실 때 공급자에게 문의하십시오. 잘못된 암호를 입력할 경우에는 프로그램이 종료됩니다.
아래 그림은 암호입력 창을 보여줍니다.

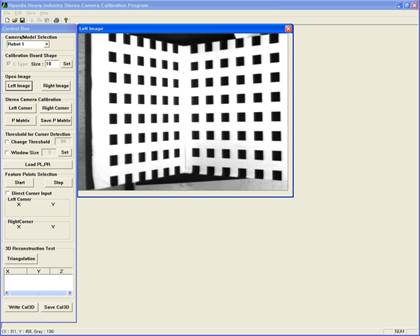
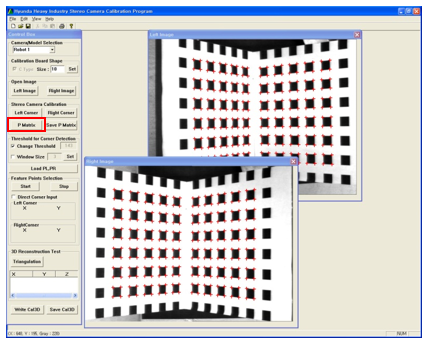
암호를 정확하게 입력했다면 다음과 같이 “Calibration Program”의 기능을 모두 사용할 수 있습니다. “Calibration Program”의 기능은 아래의 “Control Box”의 조작에 의해서 실행됩니다.
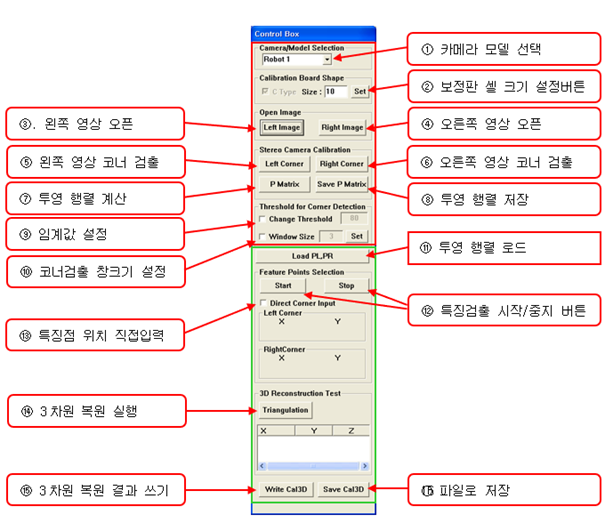
카메라 캘리브레이션 수행 절차는 다음과 같습니다.
먼저 Control Box의 “① 카메라 모델 선택” 콤보 박스를 이용하여 로봇 위치에 따른 스테레오 카메라 번호를 선택합니다.
“② 보정판 셀 크기 설정버튼”을 이용하여 사용하는 보정판의 셀의 크기를 입력합니다. 사용하는 보정판의 크기는 렌즈사양, 설치 환경에 따라 10mm, 15mm, 20mm 가 사용되며, 일반적으로 10mm 보정판을 주로 사용합니다.
“③ Left Image” 버튼을 이용하여 보정판 영상을 촬영한 스테레오 영상의 왼쪽 영상을 오픈 합니다. 영상은 “C:*HRVision MultiCam*Image” 폴더에 저장되어 있습니다. 선택된 영상이 캘리브레이션 프로그램에 로딩됩니다.

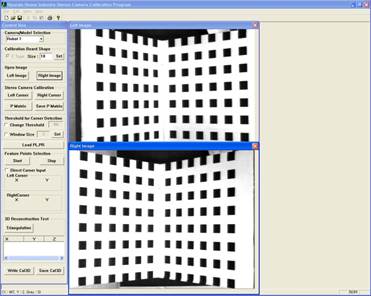
“④ Right Image” 버튼을 이용하여 보정판 영상을 촬영한 스테레오 영상의 오른쪽 영상을 오픈합니다. 영상은 “C:*HRVision MultiCam*Image” 폴더에 저장되어 있습니다. 선택된 영상이 캘리브레이션 프로그램에 로딩됩니다.

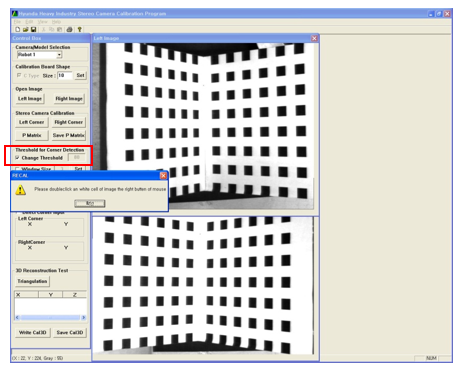
영상에서의 보정판 내에 존재하는 코너점을 구하기 위하여 코너 검출 임계값을 설정합니다. “⑨ Change Threshold” 체크박스를 클릭 합니다. 왼쪽 영상의 흰색 부분에 마우스를 배치한 후, 마우스 오른쪽 버튼을 더블클릭합니다.
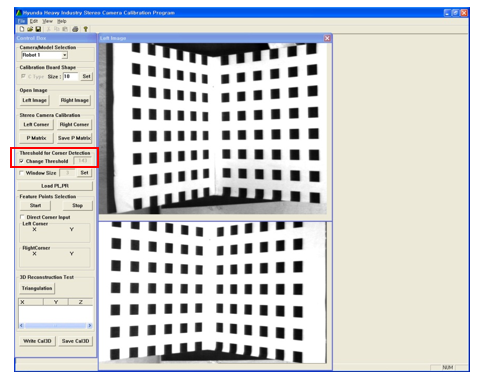
지시와 같이 왼쪽 영상의 검은색 부분에 마우스를 배치한 후, 마우스 오른쪽 버튼을 더블 클릭하면 아래 그림과 같이 코너 검출을 위한 임계값을 자동으로 설정합니다.

스테레오 카메라 캘리브레이션 작업은 왼쪽 영상과 오른쪽 영상의 동일한 영역에 대한 검정 사각형의 코너점들을 이용하여 수행합니다. 각 영상의 코너점 획득 절차는 다음과 같습니다.
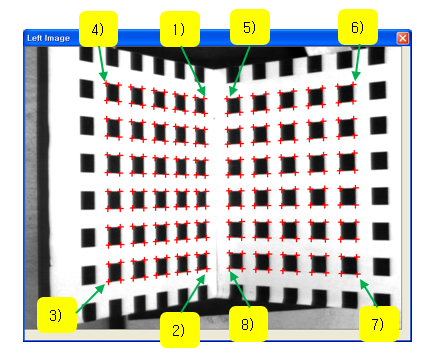
“⑤ Left Corner”버튼을 클릭 한 후, 아래와 같은 순서로 왼쪽 영상의 검정 사각형 외곽을 클릭합니다. 8개의 점을 순서대로 클릭하면, 그 영역 내부 검정 사각형의 코너를 자동으로 검출합니다.
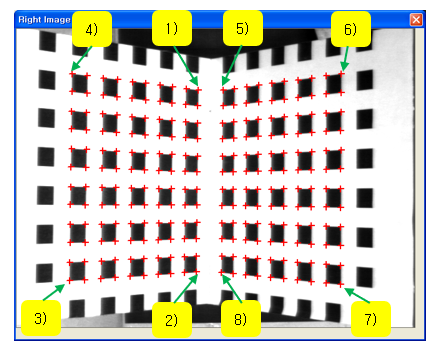
“⑥ Right Corner”버튼을 클릭 한 후, 아래와 같은 순서로 왼쪽 영상의 검정 사각형 외곽을 클릭합니다. 8개의 점을 순서대로 클릭하면, 그 영역 내부 검정 사각형의 코너를 자동으로 검출합니다.
왼쪽 영상과 오른쪽 영상의 코너점의 수가 동일하게 검출되었다면, “⑦ P Matrix”버튼을 클릭합니다. 계산이 완료되면 코너점을 파란색으로 표시합니다.
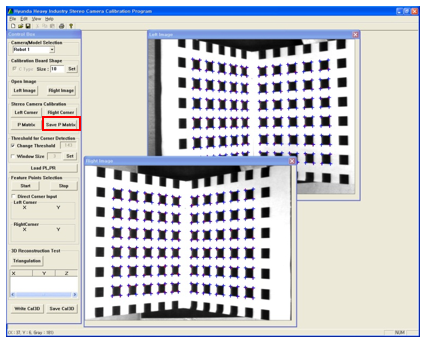
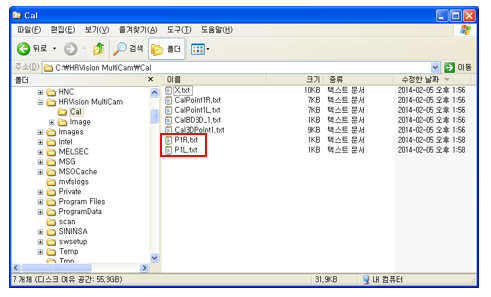
“⑧ Save P Matrix” 버튼을 클릭하여 투영 행렬을 저장합니다. 저장된 캘리브레이션 데이터는 “C:*HRVision MultiCam*Cal”폴더에 저장됩니다. 선택된 카메라 모델에 해당하는 “P번호L.txt”, “P번호R.txt” 파일이 생성되어 있는지 확인하십시오. 상기 파일이 생성되어 있으면, 카메라 캘리브레이션은 완료됩니다.