7.5.6. 메커니즘 설정
7.5.6. 메커니즘 설정
메커니즘은 유닛을 구성하는 단위이며 조그 조작시에는 하나의 그룹으로서 활용됩니다. Hi5제어기는 최대 16을 지원하지만 티치펜던트에는 6개의 조그스위치만 준비 되어 있습니다. 메커니즘을 6개 이하로 각각 할당 하여 사용할 경우 조그시에 메커니즘을 변경만으로 모든 축을 조작할 수 있는 환경이 구축됩니다.
메커니즘을 설정하면 각 축의 그룹별로 메커니즘 번호(M#)을 할당됩니다. 이 메뉴에서는 엔드리스 기능의 유효/무효 설정 및 포지셔너 그룹 설정을 할 수 있습니다.
(1) 수동모드의 초기화면에서 『[F2]: 시스템』 → 『5: 초기화』 → 『6: 메커니즘 설정』을 선택합니다.
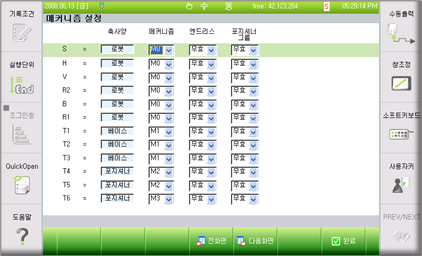
그림 7.56 메커니즘 설정
(2) 각 축 별로 메커니즘 번호, 엔드리스 기능 유효, 무효, 포지셔너 그룹번호를 설정합니다.
(3) 각 항목별 내용은 다음과 같습니다.
n 메커니즘
- 해당 축의 메커니즘 번호를 설정합니다.
- 축사양이 로봇인 경우 메커니즘 M0로 고정됩니다.
- 부가축부터 메커니즘 1~8까지 할당이 가능합니다.
- 동일 메커니즘 번호로 설정된 축 동일 그룹으로 관리됩니다.
- 부가축의 조그를 위해서 [메커니즘] 키를 이용하여 메커니즘 그룹을 전환하고 이때 조그키를 누르면 해당 메커니즘의 축의 순서대로 조그가 됩니다.
n 엔드리스
- 해당 축에서 엔드리스 기능 사용여부를 유효 및 무효로 설정합니다.
n 포지셔너 그룹
- 포지셔너 축의 포지셔너 그룹번호를 설정합니다.
- 포지셔너로 설정된 축만 포지셔너 그룹번호 설정이 가능합니다.
(4) 설정 데이터를 저장하기 위해서는 『[F7]: 완료』키를 누릅니다. [ESC]키를 누르면 변경된 데이터가 저장되지 않습니다.

l 설정된 메커니즘의 조합은 유닛으로 할당되어 사용될 수 있습니다.유닛에 관련된 개념및 내용은 다음 절을 참고하십시오.
l 포지셔너 그룹 지정 방법
① 그룹의 지정은 낮은 축부터 순서대로 지정해야 합니다.
② 동기를 하지 않는 그룹은 [0]으로 지정하며, 동기를 하는 축 이후에 설정해야 합니다.
③ 포지셔너의 동일 그룹은 2축까지만 지원하므로 3축을 동일 그룹으로 지정해서는 안됩니다.
④ 그룹 설정을 재정의 하는 경우에 이전에 지정되었던 포지셔너의 캘리브레이션 정수 값이 무효화되므로, 포지셔너의 캘리브레이션을 재실행 해야 합니다.