7.6.9. 로봇과 툴 캘리브레이션
7.6.9. 로봇과 툴 캘리브레이션
이 기능은 3차원 측정기로 로봇의 위치를 측정할 수 있는 환경에서 사용합니다.
(1) 로봇의 툴끝에 측정하고자 하는 위치를 선정합니다. 로봇의 위치와 자세를 다양하게 움직이면서 15점 이상을 측정하고 이때의 로봇 위치를 프로그램으로 기록합니다.
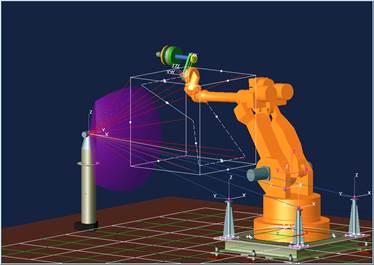
그림 7.79 로봇 데이터 측정 방법
(2) 측정점의 데이터 형식을 X, Y, Z 형식으로 정리하고 ASCII파일 형식으로 저장하되 확장자를 *.msr로 저장합니다. 이 파일을 USB 메모리에 복사하여 티칭 펜던트에 삽입합니다.
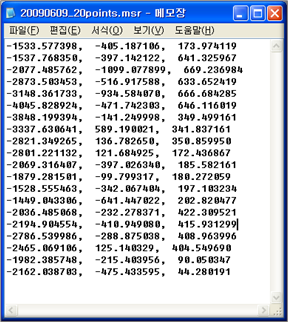
그림 7.80 측정된 로봇 위치 데이터
(3) 로봇과 툴캘리브레이션 매뉴로 들어가서 탐색기[F3]을 이용하여 해당 msr파일을 선택합니다.
(4) 측정에 사용했던 로봇 프로그램을 선택합니다.
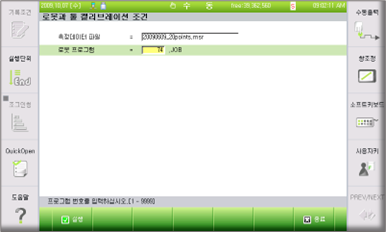
그림 7.81 로봇 캘리브레이션 데이터 입력
(5) 실행[F7]키를 누르면 캘리브레이션 화면이 나타납니다. 그 상태에서 다시 실행[F1]키를 누릅니다. 캘리브레이션 결과가 표시됩니다.
(6) 완료[F7]키를 누르면 다음과 같은 메시지가 표시됩니다. 이때 ‘예’를 선택하는 경우 축정수와 툴 정수에 자동적으로 캘리브레이션 된 값이 적용됩니다.
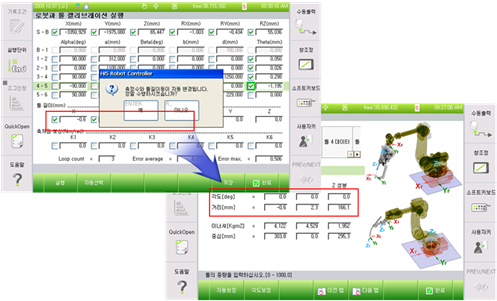
그림 7.82 로봇 캘리브레이션 실행화면
참고) 기본적으로 선택되어 있는 캘리브레이션 파라미터는 H, V, R2, B축 축정수와 툴 길이 X, Y, Z값입니다. 툴 만 캘리브레이션 하고자 하는 경우에는 각 축에 표시되어 있는 체크 박스를 해제하고 실행하면 됩니다.