3.1.1. 로봇 본체와 제어기의 기본 구성
3.1.1. 로봇 본체와 제어기의 기본 구성
 로봇 본체와 제어기의 기본 구성은 다음과 같습니다.
로봇 본체와 제어기의 기본 구성은 다음과 같습니다.
n 로봇 본체 n 제어기 n Teach Pendant n Wire Harness |
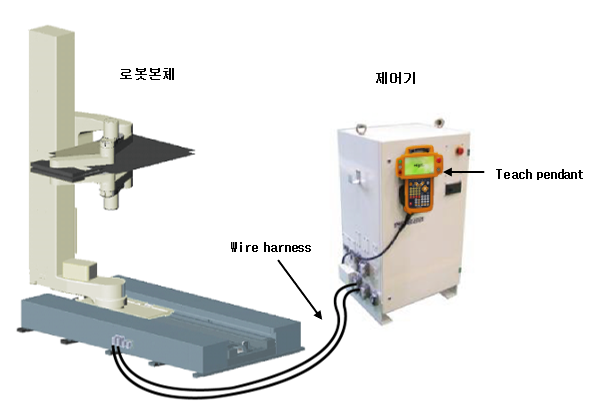
그림 3.1 본체와 제어기의 기본구성 (LCD 로봇)
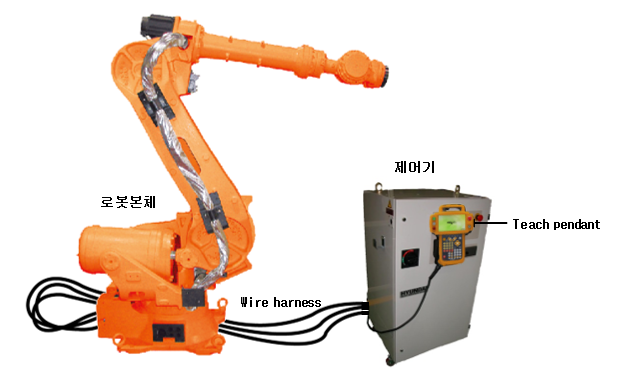
그림3.2 본체와 제어기의 기본구성 (수직 다관절 로봇)
로봇 본체와 제어기의 기본 구성은 다음과 같습니다.
n 로봇 본체 n 제어기 n Teach Pendant n Wire Harness |
그림 3.1 본체와 제어기의 기본구성 (LCD 로봇)
그림3.2 본체와 제어기의 기본구성 (수직 다관절 로봇)