5.4.1. 개요
5.4.1. 개요
CC-LINK통신으로 구성된 필드버스에서 로봇을 슬레이브(Slave)로 사용하기 위해서는 다음 그림과 같이CC-LINK보드(BD570)를 사용해야 합니다. 로봇 외부환경으로부터 유입될 수 있는 각종 노이즈와 서지를 차단하기 위하여 각종 신호들은 외부와 절연되어 있습니다.
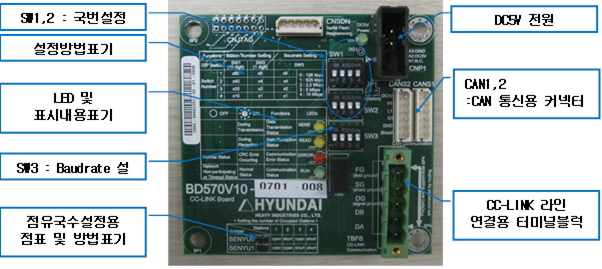
그림5.19CC-LINK보드(BD570)
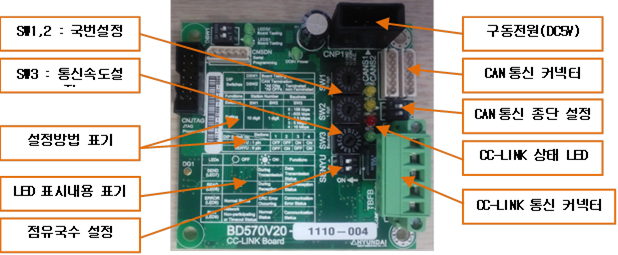
그림 5.20CC-LINK보드(BD570V20)
CC-LINK통신으로 구성된 필드버스에서 로봇을 슬레이브(Slave)로 사용하기 위해서는 다음 그림과 같이CC-LINK보드(BD570)를 사용해야 합니다. 로봇 외부환경으로부터 유입될 수 있는 각종 노이즈와 서지를 차단하기 위하여 각종 신호들은 외부와 절연되어 있습니다.
그림5.19CC-LINK보드(BD570)
그림 5.20CC-LINK보드(BD570V20)