1.1. 로봇 협조기능의 개요
1.1. 로봇 협조기능의 개요
로봇 협조기능은 여러 대의 로봇을 이용하여 한 대의 로봇으로는 할 수 없는 작업을 수행하기 위한 기능입니다.
이 기능은 다음과 같은 경우에 적용할 수 있습니다.
n 간단한 핸드를 가진 두 로봇의 협조작업으로 작업물을 핸들링하고자 하는 경우
n 작업물이 커서 단일 로봇 작업으로는 핸들링하기가 어려운 경우
n 마스터 로봇이 작업물을 핸들링하는 가운데 슬레이브 로봇이 작업물 위에 아크용접이나, 실링과 같은 지그리스 작업을 수행하는 경우
이 기능을 이용하여 최대 4대의 로봇을 협조 동기화 할 수 있습니다.
각 로봇은 독립적인 작업과 협조 작업을 하나의 프로그램에서 수행할 수 있습니다.
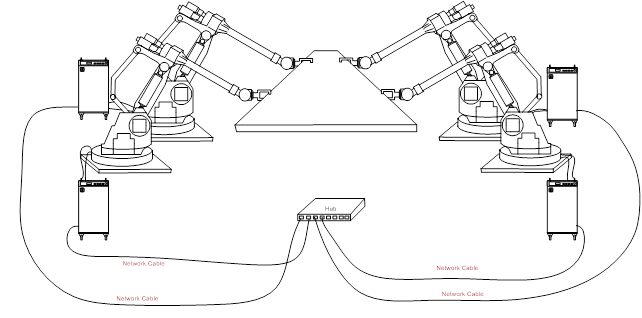
그림 1.1로봇 협조 기능