5.1. 협조 재생의 개요
5.1. 협조 재생의 개요
협조 프로그램은 독립동작 부분과 협조동작 부분으로 나눌 수 있습니다.
독립동작 부분은 통상적인 제어 방식과 동일하게 개별적으로 동작하는 부분이며, 협조 동작은 MASTER의 프로그램의 위치에 의해 SLAVE의 동작이 결정되는 COWORK ~ COWORK END 부분입니다.
(1) 협조 동작 부분은 COWORK ~ COWORK END 부분이며 COWORK명령이 시작되면 모든 협조 로봇이 COWORK이 실행될 때까지 대기합니다.
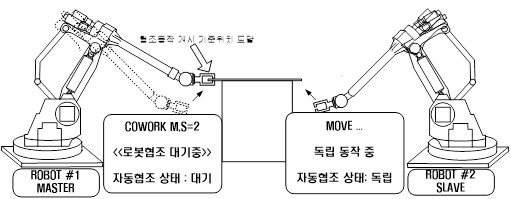
그림 5.1 협조 재생1
(2) 상대 로봇이 모두 COWORK 위치에 도달하면 협조 동작을 개시합니다.
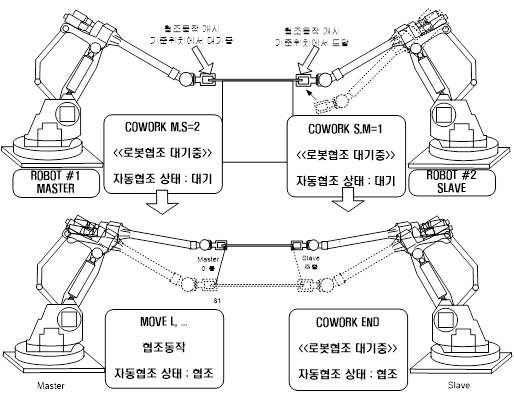
그림 5.2 협조 재생2
(3) 협조 구간 동작을 모두 끝내면 MASTER 측이 COWORK END에 도달하며 협조 상태가 종료됩니다.
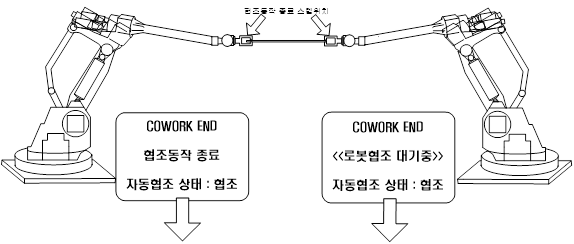
그림 5.3 협조 재생3
(4) 협조 동작이 종료되면 각자의 독립 동작을 다시 수행합니다.
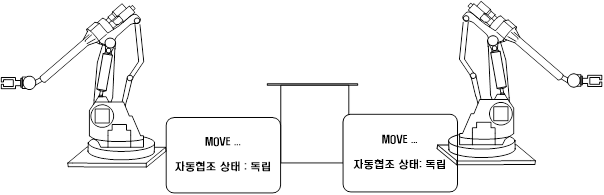
그림 5.4 협조 재생4