8.2. I/O신호
8.2. I/O신호
HR-BASIC에는 디지털, 아날로그 신호를 출력하거나 대기하는 명령문들이 있습니다. 이러한 명령문의 동작을 시뮬레이션에서 실행할 수 있습니다.
가령 2대의 로봇에 대해 각각 다음과 같은 가정을 합니다.
n 로봇1은 스텝3에 도달했을 때 DO25신호를 1로 출력합니다.
n 로봇1의 DO25신호는 로봇2의 DI32신호로 연결되어 있습니다.
n 로봇2는 스텝1에서 DI32신호가 1이 되기를 대기하며 기다립니다.
n 로봇2는 스텝3에 도달했을 때 AO2신호를 3.5로 출력합니다.
n 로봇2의 AO2신호는 로봇2의 AI1신호로 연결되어 있습니다.
n 로봇1은 스텝4에서 AI1신호가 3.0 이상이 되기를 대기하며 기다립니다.
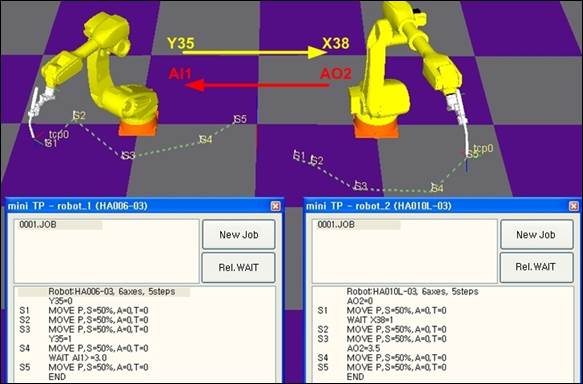
교시한 결과는 아래와 같습니다. (신호연결을 뜻하는 화살표는 이해를 돕기위해 그린 것입니다.)
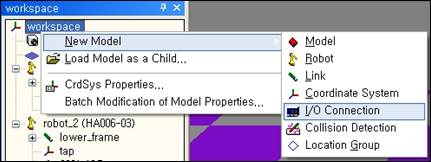
2개의 신호연결을 하기 위해 다음과 같이 workspace 모델에 대해 I/O연결 모델을 생성합니다.
새로운 I/O연결 모델이 생성되면 I/O 연결 속성 대화상자를 엽니다.

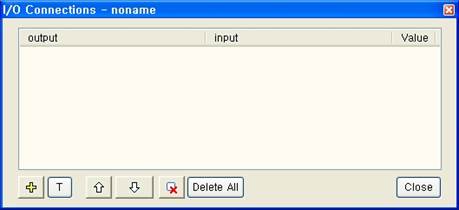
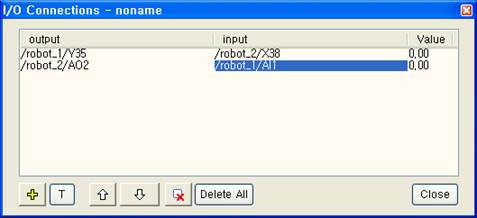
 버튼을 클릭하면 리스트에 새로운 행이 추가됩니다. 여기에 다음과 같이 각 로봇의 T경로와 입출력 신호이름을 '/'로 구분하여 입력합니다. (행을 더블클릭 한 후 타이핑을 하십시오. 혹은, T경로 버튼을 클릭하여 트리창에서 로봇을 선택한 후, 신호이름을 추가하십시오.)
버튼을 클릭하면 리스트에 새로운 행이 추가됩니다. 여기에 다음과 같이 각 로봇의 T경로와 입출력 신호이름을 '/'로 구분하여 입력합니다. (행을 더블클릭 한 후 타이핑을 하십시오. 혹은, T경로 버튼을 클릭하여 트리창에서 로봇을 선택한 후, 신호이름을 추가하십시오.)
다시 버튼을 클릭하여 마찬가지 방법으로 두번째 연결을 입력합니다. 결과는 다음과 같습니다.
 버튼(혹은 감추기 버튼)을 클릭해 대화상자를 닫습니다.
버튼(혹은 감추기 버튼)을 클릭해 대화상자를 닫습니다.
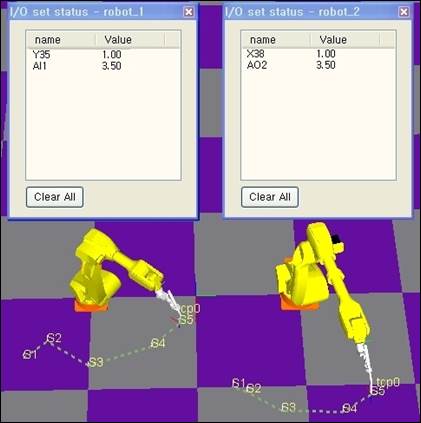
두 로봇에 대해 각각 팝업 메뉴를 열고 I/O상태를 선택합니다.
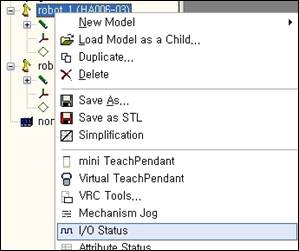
I/O 집합 상태 대화상자에는 로봇에서 출력된 신호의 이름과 값, 그리고 입력된 신호의 이름과 값이 기록됩니다.

이제, 로봇 재생(플레이백)을 시켜놓고 신호 대기를 제대로 수행하는지 관찰하십시오.