1.1. 기능의 목적
1.1. 기능의 목적
본 기능의 목적은 로봇이 고속으로 동작하면서도 진동이 없도록 하는 것입니다. 로봇의 동작을 제어하기 위해서 로봇의 동역학 모델이 사용되는데, 이 모델이 항상 정확한 것은 아닙니다. 따라서 티칭된 프로그램을 수 회 반복시키는 학습 동작을 통해 부정확한 모델을 정확하게 함으로써 로봇을 보다 빠르면서도 진동이 작게 설정할 수 있습니다.
로봇의 동역학 모델은 로봇의 위치, 자세 및 부하조건 등에 따라 그 정확도에 차이가 있습니다. 따라서 사용자가 티칭 한 스텝에 따라 달라지는 로봇의 위치, 자세 및 부하조건에 맞게 모델을 학습할 필요가 있습니다. 본 기능에서는 스텝에 옵션을 삽입하여 학습하기 위한 스텝을 지정하는 방식을 사용합니다.

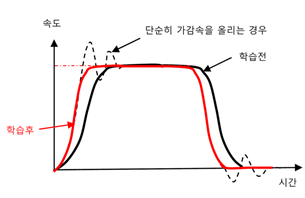
그림 1.1 학습제어 기능의 개념