2.11.1. 멀티태스킹 모션의 개요
2.11.1. 멀티태스킹 모션의 개요
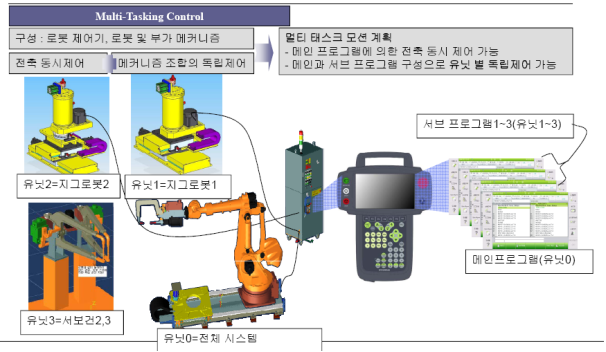
멀티태스킹을 응용하면 부가축을 제어하는 프로그램을 서브태스크 프로그램으로 할당하여 독립적인 프로그램을 구성할 수 있습니다. 아래의 그림과 같이 유닛을 서로 겹치지 않게 지정하여 각 서브태스크에서 독립적으로 부가축을 구동할 수 있습니다. 메인태스크는 로봇과 할당된 부가축의 제어가 모두 가능하지만 서브태스크에서는 할당된 부가축에 대한 제어만 가능합니다.
본 기능을 사용하기 위해서는 유닛(Unit), 매커니즘(Mechanism)의 설정, AXISCTRL명령의 사용이 필요합니다. 간략한 정의는 아래와 같습니다.
l 매커니즘은 축의 조합(로봇축, 부가축)을 세트로 구성한 것으로 조그로 하나의 매커니즘을 선택해서 매커니즘 단위로 조작이 가능합니다.
l 유닛은 매커니즘의 선택적 조합으로 매커니즘과의 차이는 작업 프로그램에서 스텝을 기록할 때 유닛 단위로 기록이 되는 점입니다.
l AXISCTRL은 부가축의 제어설정에 관한 명령문입니다.
보다 자세한 설명과 매커니즘, 유닛 설정 방법은“Hi5a 제어기 조작설명서”의 해당 내용을 참고하시기 바랍니다.