4.1.1. 인터페이스 개요
4.1.1. 인터페이스 개요
로봇과 Pick-it을 이용해서 시스템을 구축하고 작업을 수행하기 위한 절차는 그림 4-1과 같습니다. 각 절차별로 수행해야 할 내용은 다음과 같습니다.
(1) 로봇, Pick-it 시스템, 통신 장비를 설치하고 구성합니다. 로봇과 Pick-it 장비 구성은 각 설명서를 참조하시기 바라며 이더넷 통신 구성은 본 설명서 2장을 참조하시기 바랍니다.
(2) Pick-it서버 장치에 크롬 웹브라우저로 접속해서 기본적인 설정을 해주어야 합니다.
(3) 현대로봇은 TP를 이용해서 사용자 환경, 제어 파라미터, 로봇 파라미터 페이지로 들어가서 좌표계와 이더넷 통신 등을 설정합니다.
(4) Pick-it응용 현대로봇 명령문을 사용하여 수행할 작업의 JOB 파일을 작성합니다. 수행할 JOB 파일은 교정(Calibration), 빈 피킹 등이 있습니다.
(5) 로봇의 플랜지에 교정판(Calibration plate)을 부착하고 교정을 위한JOB 파일을 이용해서 Pick-it의 좌표계를 로봇의 좌표계에 교정시키는 작업을 수행합니다.
(6) Pick-it좌표계의 교정이 완료되고 나면 JOB 파일을 이용해서 로봇이 작업물을 피킹하도록 합니다.
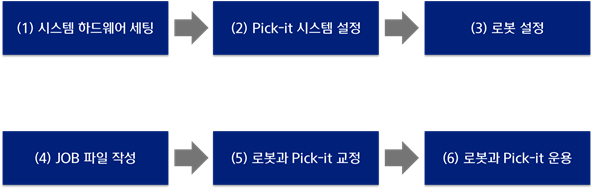
그림 4-1 로봇과 Pick-it 인터페이스 절차
로봇을 이용한 작업을 하기 위해서는 교정을 먼저 수행해야 합니다. 그 이후에 로봇과 Pick-it을 이용한 작업을 수행할 수 있습니다. 본 장에서는 로봇을 제어하고 Pick-it으로 명령을 주는 JOB 파일을 작성하여 Pick-it좌표계를 로봇 좌표계에 교정하는 방법을 먼저 설명합니다. 그리고 로봇에서 Pick-it으로 명령과 데이터를 주고 받아서 Pick-it으로부터 작업물의 포즈를 받아 picking처리하는JOB 파일을 작성하여 로봇을 이용하여 picking 작업을 하는 방법을 설명합니다.