2.3.3. 포지셔너 캘리브레이션 실행
2.3.3. 포지셔너 캘리브레이션 실행
(1) 『F2:시스템』 à 『6.자동정수설정』 à 『2.포지셔너 캘리브레이션』을 선택합니다.
(2) 캘리브레이션 할 포지셔너 그룹 및 이에 해당하는 JOB 프로그램을 선택하고 『F1:실행』을 누릅니다.
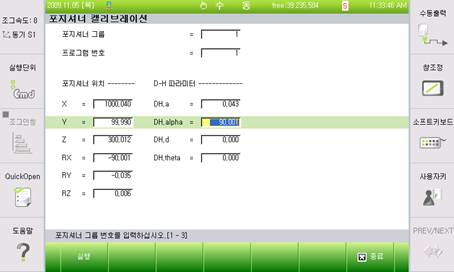
(3) 캘리브레이션 결과가 표시됩니다. 『F5:종료』키를 누르면 해당 데이터가 정수파일에(ROBOT.MCH) 저장되고 설정이 완료됩니다.
(4) 사용자가 캐드 데이터로 포지셔너의 위치를 정확히 알고 있는 경우, 수동으로 포지셔너의 위치 및 DH파라미터를 설정한 후 『F5:종료』키를 누르면 마찬가지로 정수파일에 반영됩니다.