2.3. 예제 프로그램
2.3. 예제 프로그램
모따기(Chamfering) 작업
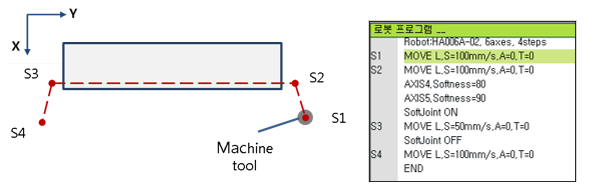
로봇의 움직임 | § S1에서 가공 시작점임 S2로 이동 § SoftJoint기능on 후S3로 이동하며 모따기 작업 수행 § SoftJoint 기능 off 후 S4로 이동 |
위치기록(S2~S3) | SoftJoint는 외력에 밀리는 기능이므로 작업물에 힘을 가하기 효과를 얻기 위해서는 티칭점이 작업물의 안쪽에 위치해야 함 |
Axis.Softness | § Softness의 값은 작업방향, 작업물의 재질, 가공정도를 고려하여 설정 § 상기 예제는 로봇좌표계 기준 +X방향으로 밀리며 –Y방향으로 이동하므로 R2축과 B축에 Softness를 설정함 |