1.2. 기준점 등록
1.2. 기준점 등록
이번 절에서는 작업물의 기준점을 등록하는 법을 설명합니다. | |
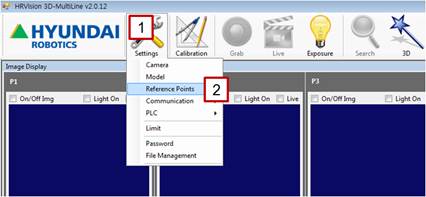
[Step 1] (1) 메인 메뉴에서 [Settings] 버튼을 클릭합니다. (2) [Reference Points] 메뉴를 선택합니다. | |
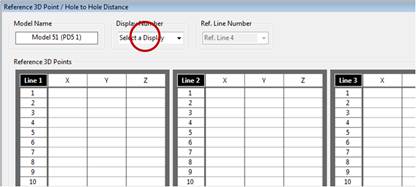
[Step 2] (1) [Display Number]를 선택합니다. (2) [Display Number]는 카메라가 측정하는 지점의 번호와 같습니다.
| |
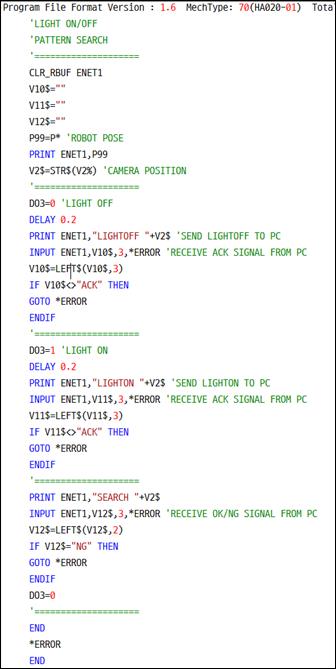
[Step 3] (1) 위의 예제를 참고하여 프로젝터의 라인 패턴 광을 On/Off하고, 패턴은 탐색하는 로봇 JOB 프로그램을 만듭니다.
| |
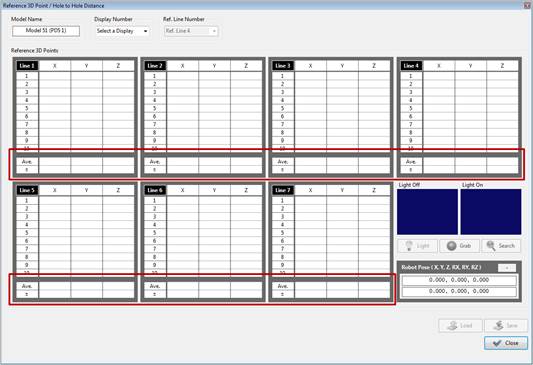
[Step 4] (1) 프로젝터의 라인 패턴 광을 On/Off하고, 패턴은 탐색하는 로봇 JOB 프로그램을 10회 반복합니다. 평균값은 [Ave.]칸에, 반복 정밀도는 [±]칸에 표시됩니다. (2) 반복 정밀도가 1mm를 넘어가면 패턴의 검출이 부정확하다는 뜻이므로, 패턴의 등록 위치를 바꾸거나 설정 값을 바꾸어 반복 정밀도의 수치를 낮추십시오. (3) 카메라가 로봇에 부착되어 있다면 [Robot Pose]에 포즈 값이 제대로 들어오는지 확인합니다. 아래의 그림과 같이 [Robot Pose]의 오른쪽 위에 [좌표계]도 제대로 표시되는지 확인합니다. 베이스 좌표계의 경우 [-]가, 로봇 좌표계의 경우 [R]이, 사용자 좌표계의 경우 [Un] 등이 표시되므로 원하는 좌표계로 로봇 포즈를 받고 있는지 확인합니다.
(4) 문제가 없으면 [Save] 버튼을 눌러 저장합니다. 그리고, 다른 지점의 카메라에 대해서도 같은 과정을 수행합니다.
|