4.8.3. 운전이력
4.8.3. 운전이력
로봇을 운전한 이력을 표시합니다. 로봇을 정지, 기동하거나 모드 스위치를 변경하는 등, 운전과 관련된 신호가 입력된 경우에 입력내용과 시각, 입력 시점의 프로그램번호, 스텝번호, 축 데이터, 입출력상태를 표시하여 로봇 보수에 참조할 수 있습니다. 운전이력 내용은 기본 설정 100회에서 사용자 지정시 1000회까지 기록할 수 있으며, 『[F1]: 재작성』키에 의해 이력을 초기화 할 수 있습니다.
(1) 『[F1]: 서비스』 → 『7: 시스템 진단』 → 『3: 운전이력』 선택합니다.

그림 4.131 운전이력 화면
(2) 특정 항목을 선택하고, 『[F2]: 범용입력』, 『[F3]: 범용출력』, 『[F4]: 축데이터』, 『[F5]: 전용입력』, 『[F6]: 전용출력』 중 하나를 누르면 해당 운전이력 발생시의 상태를 알 수 있습니다. 예를 들어 방향키로 『1: S-07 자동운전 중 모드스위치가 변경되었습니다.』를 선택하고 『[F6]: 전용출력』키를 누르면 다음의 화면이 표시됩니다.
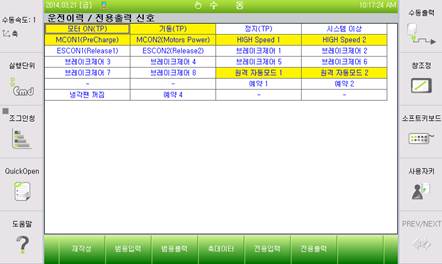
그림 4.132 운전이력/전용출력 신호

l 『[F1]: 재작성』을 선택하면 최대 이력 개수를 입력할 수 있는 대화상자가 표시됩니다.
l 운전이력은 기본적으로 100개의 이력을 저장하고 있지만 사용자의 필요에 따라 운전이력 저장 개수를 1~1000개까지 설정할 수 있습니다. 최대이력 개수를 입력하고 [Enter]를 누르면 지금까지의 운전이력이 모두 지워지고 새로운 이력을 사용자 지정 개수만큼 저장하게 됩니다.