3.3. 운반 방법
3.3. 운반 방법
로봇 운반은 크레인 및 지게차를 이용하여 운반 할 수 있습니다. 로봇을 이동 할 경우, 아래 그림과 같이 각 운반 상황에 적합한 로봇 자세로 변경하여, 아이볼트(Eye bolt) 및 지정된 운반장비를 이용하여 운반 바랍니다.

l 로봇을 이동하거나 내릴 경우, 천천히 이동하며 매우 조심 하셔야 합니다.
l 로봇을 바닥에 내릴 경우, 로봇 하부 설치 면이 바닥 면과 강한 충돌이 발생 하지 않도록 주의 바랍니다.
l 지정된 운반 장비 및 방법 이외에 수단으로 절대 운반하지 마시기 바랍니다.
l 로봇을 운반할 경우 크레인 와이어(Wire)나 지게차에 의해 로봇의 모터, 커넥터, 케이블 등이 손상되지 않도록 각별히 주의하여 주십시오.
l 로봇을 운반할 경우 로봇이 수평이 되도록 유지하여 주십시오.
l 지게차를 이용하여 로봇을 운반할 경우 운반장비를 고정하고 있는 볼트를 점검하여 느슨해진 볼트는 조여주십시오.
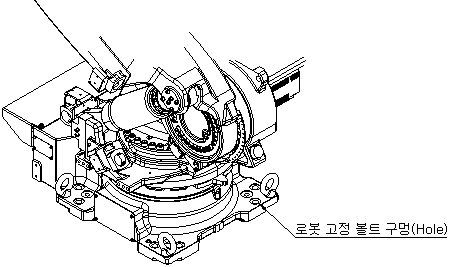
l 운반장비(Forklift bracket)를 분해 혹은 조립할 경우 로봇의 몸체가 미끄러지므로, 로봇 고정 볼트 구멍(Hole)을 이용하여 로봇을 볼트로 고정하여, 로봇이 전도되지 않도록 하여 주십시오.