3.3.1. 크레인 이용
3.3.1. 크레인 이용
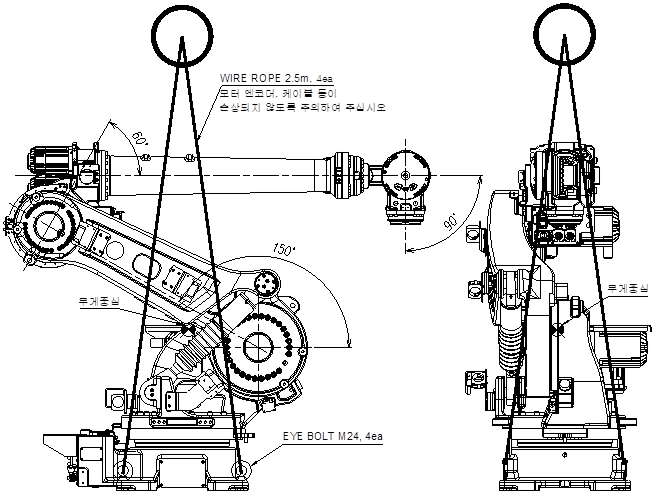
S- Axis | 0 |
H- Axis | 150 |
V- Axis | -60 |
R2- Axis | 0 |
B- Axis | -90 |
R1- Axis | 0 |
그림 3.5 운송 방법: 크레인 이용 [HS200L]
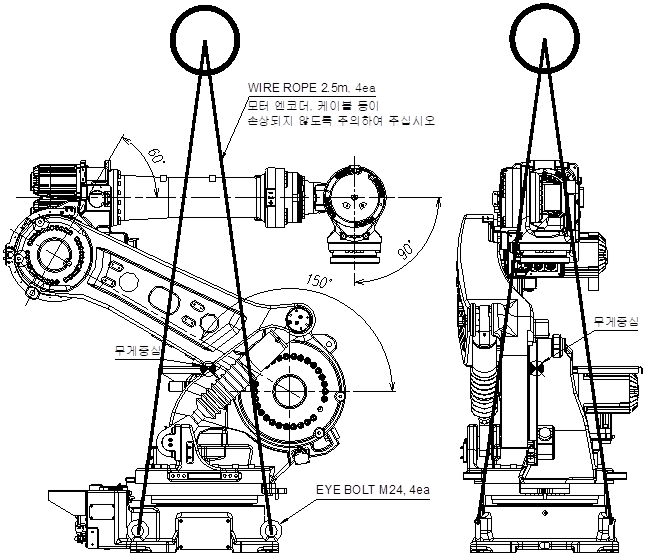
S- Axis | 0 |
H- Axis | 150 |
V- Axis | -60 |
R2- Axis | 0 |
B- Axis | -90 |
R1- Axis | 0 |
그림 3.6 크레인 이용 [HS260/HH300]
다음의 로봇 리프팅 지시는 공장 출하상태의 로봇에 유효합니다. 부가 장비를 로봇 본체에 추가하면,무게 중심이 변경되어 리프팅이 어렵게 됩니다.

n 절대로 로봇 본체 아래로 걸어 다니지 마십시오.
n 그림과 같은 로봇 자세를 취합니다.
n BASE BODY에4-M24 EYE BOLT를 설치합니다.
n EYE BOLTS(4개)에 와이어 로프(4개)를 체결합니다.
n 최소 크레인 용량 : 2.5톤, 최소 로프 용량: 1톤/개당
n 로봇 본체의 손상 방지용 보호 호스(50㎝)를 부착합니다.
n 리프팅 작업 시 안전 규정을 준수합니다.
n 로봇의 모터, 커넥터 및 케이블이 손상되지 않도록 주의하여 로프를 고정 합니다.
n 본체의 무게 :
모델 | HS200L | HS260 | HH300 |
무게(kg) | 1,223 | 1,250 | 1,250 |