2.2. 제어기 설정
2.2. 제어기 설정
제어기가 협조제어를 위한 통신 및 로봇 번호 등을 설정합니다.
(1) 수동모드에서 『[F2]: 시스템』 → 『2: 제어 파라미터』 → 『9: 네트워크』 → 『3: 서비스』를 선택합니다.
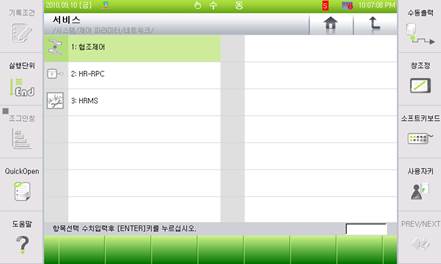
(2) 『1: 협조제어』를 선택합니다.
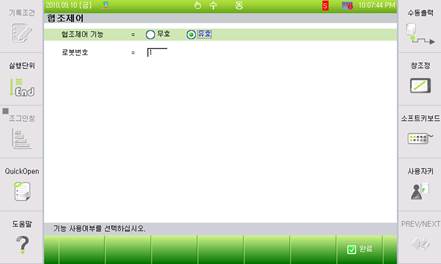
(3) 상기 파라미터의 용도는 다음과 같습니다.
n 협조제어 기능 <무효, 유효>: 협조제어 기능의 사용 여부를 선택합니다.
n 로봇 번호: 로봇의 번호를 설정합니다. <1~4>
로봇의 번호는 협조제어에서 연결된 네트워크상에서 자신의 제어기를 인식하는 번호입니다. Hi5 제어기에서는 최대 4대의 로봇이 협조 네트워크를 구성할 수 있습니다. 로봇 번호가 중복되지 않도록 설정하여 주십시오.
주의사항
l 협조제어 기능은 특수 로봇 및 6자유도 미만의 로봇에는 HiNET통신만 적용이 가능하며 COWORK명령은 사용할 수 없습니다.
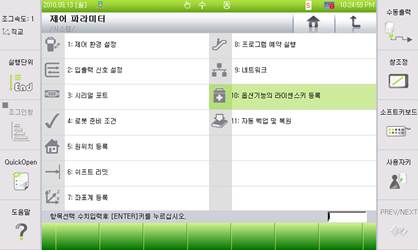
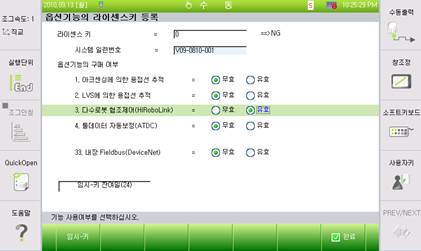
l 협조제어는 옵션사양입니다. 협조제어 COWORK 명령을 사용하기 위해서는 라이센스 키 등록이 필요합니다. 한 달간은 임시 키를 발급받아 사용할 수 있으나 그 이상 사용하기 위해서는 당사에 문의하시기 바랍니다. (『[F2]: 시스템』 → 『2: 제어 파라미터』 → 『10: 옵션기능의 라이센스키 등록』)