4.3. CMOV 명령
4.3. CMOV 명령
CMOV *{**파라미터1}, {파라미터2}, {파라미터3}, {파라미터4}, {파라미터5}* | |
*파라미터1* | ․마스터 시스템의 매니퓰레이터 식별자
R(#1)(#2) #1: 마스터 로봇 시스템 번호 (1~4) #2: 로봇 시스템의 마스터 매니퓰레이터 식별자 (0: Robot, 1: Positioner Group 1, 2: Positioner Group 2) |
*파라미터2* | ․보간 (interpolation)
슬래이브 로봇의 보간 방식 지정, 직선과 원호만 가능 (L: Linear, C: Circular) |
*파라미터3* | ․보간 속도 (Speed)
작업물 대비 상대적인 속도 지정 |
*파라미터4* | ․Accuracy (0~3) |
*파라미터5* | ․Tool 번호 (0~7) |
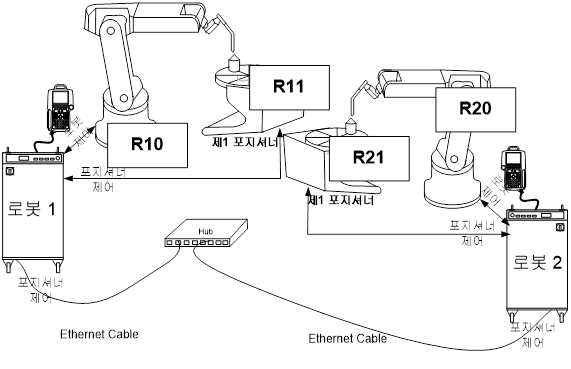
그림 4.3 ID 식별자 구분 방법