4.4. 아크용접 및 실링용 티칭(지그리스 협조제어 옵션사양)
4.4. 아크용접 및 실링용 티칭(지그리스 협조제어: 옵션사양)
(1) 마스터와 슬래이브의 수동 협조 로봇 역할을‘독립’으로 설정한 후 독립 스텝을 COWORK 개시 스텝을 티칭하고 COWORK 명령을 삽입합니다.

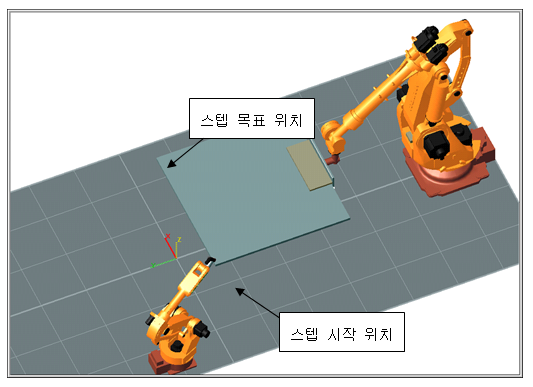
그림 4.4 스텝 시작 및 목표 위치
(2) 수동 협조상태를 Master와 Slave를 자신의 역할로 변경합니다.

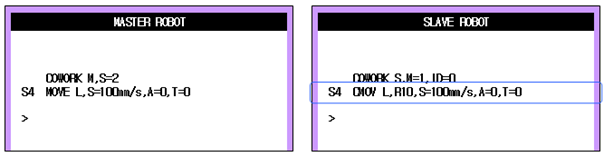
(3) Master를 조그조작하면 슬래이브는 추종하게 됩니다. 원하는 기록위치에 마스터 스텝을 기록합니다.

(4) Slave를 SHIFT+사용자 키나R351,3 명령을 이용하여 CMOV기록 상태로 전환합니다. 화면 오른쪽 상단의 로봇역할 표시가 녹색에서 회색으로 변경됩니다.

(5) 슬래이브 로봇을 목표위치까지 조그 조작한 후 ‘기록’키를 누릅니다.
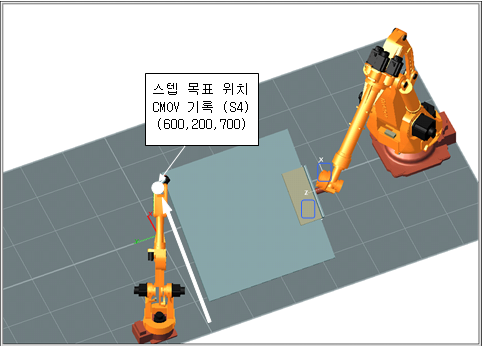
그림 4.5 스텝 목표 위치 CMOV 기록
슬래이브에는 CMOV가 기록됩니다. CMOV의 기록위치는 마스터 툴 엔드이펙터 좌표계 기준의 좌표 값입니다. QUICK OPEN키를 눌러 기록된 좌표위치를 확인, 수정이 가능합니다.
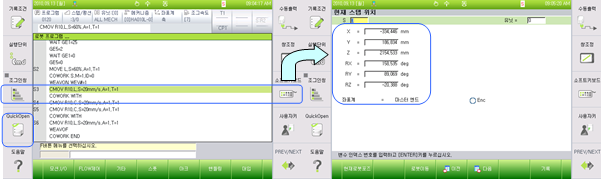
이때 기록된 좌표계는 ‘마스터엔드’ 로 표시됩니다.
(6) 마찬가지 방법으로 슬래이브를 이동하며 여러 개의 CMOV 스텝을 기록할 수 있습니다.

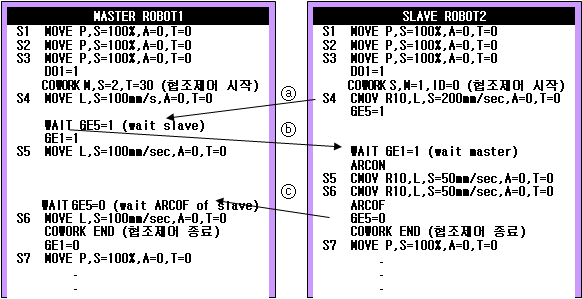
(7) 단 기록된 스텝에 대한 이동 계획은 마스터와 슬래이브가 개별적으로 수행하므로 마스터와 슬래이브의 목표 위치에 도달하는 시점은 서로 다릅니다. 따라서 협조 구간에서 마스터의 MOVE위치와 슬래이브의 CMOV위치의 시작 위치 타이밍을 맞추기 위해서는 HiNet I/O를 이용한 상호 인터록 방법을 사용할 수 있습니다.
(8) 예를 들어 마스터와 슬래이브의 스텝 5(S5) 시작 시점을 동기화시키기 위해 GE혹은 DE변수를 이용하여 서로 상대가 스텝위치에 도달했는지를 확인하는 방법을 사용할 수 있습니다.

※ 위와 같은 방법을 사용하면 마스터와 슬래이브가 스텝 4(S4)에 도달한 후 상대 로봇이 스텝 4까지 도달했는지 확인하고 다음 스텝(S5)로 이동하게 됩니다.
(9) 협조 동작을 마치면 협조 제어를 마치도록 마스터와 슬래이브에 모두 COWORK END 명령을 삽입하면 협조제어 티칭이 완료됩니다.


위에서 설명한 전체 프로그램은 아래와 같으며 협조제어의 타이밍 제어를 위해 ⓐ, ⓑ, ⓒ와 같은 타이밍 제어를 실시할 수 있습니다.
※ COWORK WITH 명령을 사용한 프로그램 방법
COWORK WITH 명령은 협조제어 중(COWORK~COWORK END사이)에서 마스터와 슬래이브 로봇간에 위치를 동기화할 때 사용하는 명령입니다.
협조제어 중에 COWORK WITH명령을 만나게 되면 협조 중인 로봇이 모두 COWORK WITH에 도달할 때까지 대기합니다. 따라서 상기의 프로그램은 다음과 같은 방법으로도 변경할 수 있습니다.

COWORK WITH명령을 사용하면 위와 같이 간단하게 마스터와 슬래이브의 협조 시작위치를 동기화 하는 것이 가능합니다.
※ 참고
l HiNet을 이용한 협조제어 상호 인터록은 상기의 방법 외에도 여러 가지 방법으로 구성할 수 있습니다.
l 슬래이브에서 마스터의 위치에 따른 슬래이브의 CMOV 기록위치를 확인하고자 할 경우에는 스텝 전 후진 기능으로 확인할 수 있습니다.
l HiNet I/O에 대한 내용은 6절을 참고하십시오.
주의사항
l CMOV의 위빙동작을 사용하려면 참조 점 PREP 설정은 협조제어 구간 내에(COWORK~COWORK END) 기록해야 합니다.
l 레이저 비전 센서를 이용한 CMOV궤적 Seam-Tracking 기능은 지원하지 않습니다.
l COWORK WITH명령은 협조제어 구간에서(COWORK~COWORK END) 마스터와 슬래이브 모두 동일한 개수만큼 사용하여야 합니다.