3.2. 서비스의 시작과 LOADF/SAVEF 수행
3.2. 서비스의 시작과 LOADF/SAVEF 수행
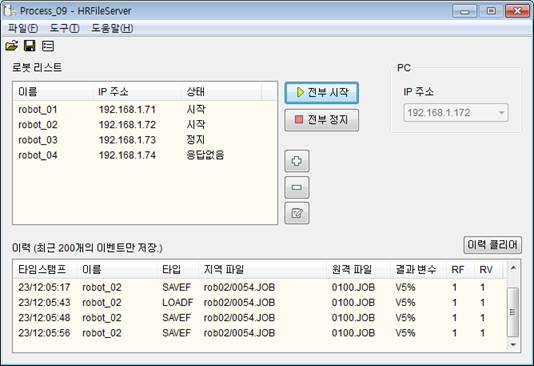
Robot List의 상태 열의 의미는 아래와 같습니다.
표 3‑1 상태 열의 의미
상태 | 의미 |
응답없음 | 로봇의 IP주소로부터의 Ping 응답이 없습니다. 아래 사항들을 점검하십시오. 1) 로봇 제어기가 켜져 있는지, 2) IP주소 설정이 정확한 지, 3) 이더넷 케이블이 제대로 연결되어 있는지, |
정지 | 파일 서비스를 시작하지 않은 상태입니다. |
시작 | 파일 서비스를 시작한 상태입니다. 로봇으로부터의LOADF, SAVEF 이벤트를 대기하고 있습니다. |
응답없음이면 점검이 필요합니다. 응답없음 상태인 로봇이 없다면,  버튼을 클릭하여 서비스들을 시작하십시오. (계속 정지에 머물러 있는 로봇이 있다면, Hi5제어기의 전원을 껐다 켜 보십시오.)
버튼을 클릭하여 서비스들을 시작하십시오. (계속 정지에 머물러 있는 로봇이 있다면, Hi5제어기의 전원을 껐다 켜 보십시오.)
예를 들어, [도구 - 옵션]의 기준 경로가 아래와 같이 설정되어 있다고 가정할 때,
U:/HRFileServer/Proc_09 |
로봇제어기에서 LOADF 명령문을 아래와 같은 파라미터로 수행했다면,
LOADF V5%,EXT,”rob02/0054.JOB”,”0010.JOB” |
HRFileServer는 아래와 같이 PC측 원본 파일을 로봇제어기 측 대상파일로 복사합니다.
원본(PC) | U:/HRFileServer/Proc_09/rob02/0054.JOB |
대상(로봇제어기) | 0010.JOB |
로봇제어기에서 SAVEF 명령문을 아래와 같은 파라미터로 수행했다면,
SAVEF V5%,EXT,”rob02/0054.JOB”,”0010.JOB” |
HRFileServer는 아래와 같이 로봇제어기 측 원본 파일을 PC 측 대상파일로 복사합니다.
원본(로봇제어기) | 0010.JOB |
대상(PC) | U:/HRFileServer/Proc_09/rob02/0054.JOB |
(만일, 옵션의 기준 경로를 비워 두면, LOADF나 SAVEF 명령문에는 PC측 절대 경로 파일명이 명시되어 있어야 합니다.)
이제 모든 준비가 끝났으므로, 로봇 공정을 시작하십시오.