3.5. Pattern Recognition Result Window
3.5. Pattern Recognition Result Window
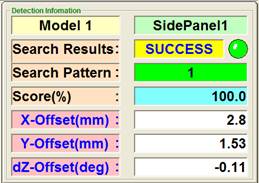
수동검사, 자동운전 시 패턴인식 및 위치 측정 결과를 표시합니다.
각 항목의 내용은 다음과 같습니다.
n MODEL : 패턴인식을 수행하는 모델명과 모델 ID를 표시합니다.
n Search Results :
패턴인식 결과를SUCCESS/FAILURE로 표시합니다. SUCCESS일 경우 LED는 녹색으로 표시되며, FAILURE일 경우 적색으로 표시됩니다.
n Search Pattern : 패턴검출 결과, 검출된 패턴 번호를 표시합니다.
n Score(%) : 패턴검출 결과, 정합도를 백분율로 표시합니다.
n X-Offset(mm) : 패턴검출 결과, 로봇 X 축 방향의 위치 이동량을 표시합니다.
n Y-Offset(mm) : 패턴검출 결과, 로봇Y 축 방향의 위치 이동량을 표시합니다.
n dZ-Offset(deg): 패턴검출 결과, 로봇의 Z축 기준으로 회전한 각도를 표시합니다.
* 참고: 상기 결과 표시창에서 X, Y, dZ 이동량은 보정작업시 결정되는 좌표계에 따라 자동변경 표시됩니다.
(예 :보정작업시 좌표계 설정을 YZ-Coord(RX-)로 설정할 경우, Y 이동량, Z 이동량, dX 이동량으로 자동 표시됩니다.)