5.1. 신호 입출력
5.1. 신호 입출력
ROBCAD 내에서 신호 입출력의 시뮬레이션을 위해서는, 다수의 로봇 혹은 장치 사이의 신호 정의가 선행되어야 합니다.
다수의 로봇이나 장치를 시뮬레이션 하려면 ROBCAD의 SOP(Sequence of Operation) 기능을 사용합니다. SOP의 자세한 사용방법은 ROBCAD 매뉴얼 혹은 도움말을 참조하십시오.
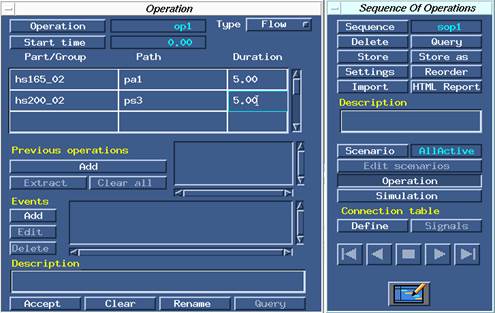
그림 5.2 Sequence Of Operations 메뉴
SOP 대화상자를 열고, 새로운Sequence와 새로운 Operation을 생성합니다.
Operation 대화상자가 열렸으면, Type리스트에서 Robot을 선택한 후, Procedure Matrix(가운데의 표) 내에 로봇과 그에 대응하는 경로명을 마우스로 선택하여 입력합니다. Accept와 Confirm을 누르면 Operation 생성이 끝납니다.

그림 5.3 Define connections 대화상자
SOP 대화상자에서 Connection Table행의 [Define] 버튼을 누르면 <Define connections> 대화상자가 열리면, [Connection table] 버튼을 눌러 새로운 테이블을 정의합니다. 계속해서 [Add] 버튼을 눌러 신호 항목을 정의합니다.

그림 5.4 신호 항목 정의의 예
예를 들면 [그림 5.4]와 같이 정의하면hs165_02의 DO7 신호를 hs200_02의 DI7으로 연결하게 됩니다. [Accept]버튼을 누르면 연결테이블에 정의한 신호의 쌍이 추가됩니다.
신호의 이름은 반드시 DO/DI의 쌍이나 GO/GI의 쌍으로 합니다. DO/DI의 신호타입은 Boolean, GO/GI의 신호타입은 Int로 하십시오.
이제 <Sequence Of Operations> 메뉴에서 [Simulation]버튼을 누르면, [그림 5.5]와 같은 대화상자가 나타나며, 플레이버튼을 눌러 신호를 주고받는 시뮬레이션을 수행할 수 있습니다.
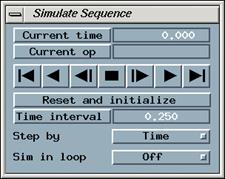
그림 5.5 Simulate Sequence 대화상자
NOTE Step버튼과 정밀도
Step버튼으로 한 스텝의 로봇동작을 시켰을 경우, 툴 끝은 목표 로케이션에서 정확히 멈추지 않고 정밀도 설정을 한 만큼의 거리(zone)를 두고 멈추게 됩니다. 목표 로케이션에서 정확히 멈추게 하려면 정밀도 거리(혹은 축 각도)를 0으로 주어야 합니다. |
NOTE 원호보간 시뮬레이션
실제 Hi5 제어기와 Hi5 OLP Package의 원호보간 동작은 다음의 2가지 원칙으로 수행됩니다.
원칙1. Target 다음 스텝이 C이면, 이것을 참조 점으로 사용
원칙2. Target 다음 스텝이 C가 아니면 이전 스텝을 참조 점으로 사용
ø Step1이 원호 보간이고 현재의 로봇 툴 끝 위치가 먼 곳에 있으면 아주 큰 원을 그리다가 모션 에러가 발생할 수 있습니다.
ø Target이 마지막 스텝이면 이전 스텝이 참조 점이 됩니다. |

