2.3.2. 통신 방법
2.3.2. 통신 방법
PC는 server, 로봇 제어기는client로 UDP/IP 통신이 수행되고 통신 주기는5msec입니다. 제어기의 메인보드는 3개의 네트워크 포트 (EN0, EN1, EN2)를 제공하나 PC에서는 EN2에 설정된 IP 주소와 포트 번호=6001와 통신해야 합니다. (EN2의 IP 주소 등 설정은 'Hi5 제어기 조작설명서'의 네트워크 편을 참조하십시오.) PC의 IP 주소와 포트 번호는 OnLTrack ON문에 설정된 값과 동일하여야 하며 PC와 제어기는 크로스 이더넷 케이블로 연결되어야 합니다. PC와 제어기의 데이터 송수신을 위해서는 통신 순서에 맞도록 Command 변수를 송수신해야 합니다. 그림 3.1은 PC와 제어기 간 통신 순서와 송수신 되는 Command 변수를 나타낸 것입니다.
① PC에서 UDP/IP 통신 초기화 및 연결대기 ② 제어기에서 OnLTrack ON문 실행 시 PC로 시작 알림 송신 (Command='S') ③ PC에서 시작 알림 수신 후 제어기로 연결 확인 송신 (Command='S') ④ PC에서 위치 증분지령 계산 후 제어기로 송신 (Command='P') ⑤ 제어기에서 위치 증분지령 수신, 반영 후 로봇의 현재위치 송신 (Command='P') ⑥ ④, ⑤ 반복 후 OnLTrack OFF문 실행 시 PC로 종료 알림 송신 (Command='F') |
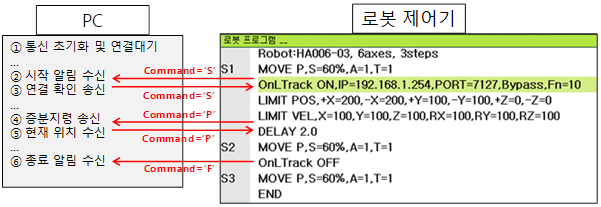
그림 2.2 PC와 로봇 제어기간 통신 순서
PC는 server, 로봇 제어기는client로 UDP/IP 통신이 수행되어야 합니다. client인 로봇 제어기는 그림 3.1과 같은 로봇 프로그램이 재생되면 OnLTrack ON, OFF문에 따라 server인 PC에 자동으로 통신연결이 시작 및 종료가 되면서 온라인 트래킹 기능이 작동될 수 있습니다. 또한 PC와 로봇 제어기 간 통신 주기는 5msec입니다. 만약 제어기5msec 이내에 2개 이상의 데이터가 수신되면 최근 수신된 데이터만 적용되고 이전 데이터는 무시되므로 PC에서 데이터 전송 시 유의하시기 바랍니다.