2.2.2. 팔레타이즈 패턴 레지스터
2.2.2. 팔레타이즈 패턴 레지스터
팔레타이즈 기능을 수행하기 위한 작업물 및 작업환경을 입력하는 것으로 팔레타이즈 기능을 사용하기 위해서 필히 입력해야 합니다. 최대 16개의 『패턴 레지스터』를 저장할 수 있습니다.
< , >의 음영으로 표시되어 있는 부분과[ ]의 설정되어있는 값은 초기값을 의미합니다.
(1) 팔레타이즈 기능 적용 = <미사용, 사용>
현재 패턴 레지스터를 사용할 것인지 결정합니다. 팔레타이즈 기능사용을 원하실 경우, 필히 사용으로 설정하셔야 합니다.
(2) 작업종류= <팔레타이즈, 디팔레타이즈 >
팔레타이즈 또는 디팔레타이즈를 할 것인지 결정합니다.
(3) 작업물 개수(개수/단) = [ 1]개
한 단의 총 작업물 개수를 말하며. 한 단에 최대 25개를 쌓을 수 있습니다. 원하는 개수를 설정합니다. 설정범위는 1 ~ 25 입니다. 그림2.2를 참조하십시오

그림 2.1 작업물 개수(개수/단)
※ 주의사항
l 현재 작업물 개수 중 일부 지원되지 않으며, 요구가 있을 시, 반영 가능합니다.
(4) 패턴번호 = [ 1]번
패턴번호는 적재 모양을 구분하며, 다른 6개의 패턴을 갖고 있습니다. 원하는 모양의 패턴번호를 설정합니다. 설정범위는 1 ~ 6 입니다.
※ 주의사항
l 현재 패턴 중 일부 지원되지 않는 패턴도 있으며, 요구가 있을 시, 반영 가능합니다.
(5) 작업물 정렬 = <외곽선, 중심>정렬
패턴구성형식이란 패턴 구성 시, 패턴을 구성하는 작업물 크기 비(작업물의 폭(Width)과 넓이(Length)의 비)에 따라 발생하는 Offset량을 어디에 반영할 것인지를 설정하는 항목입니다. 여기서 Offset량이란, 작업물과 작업물 사이의 간격을 의미하며, 팔레타이즈 기능에서는 이 양을 생성하여, 설정값에 따라 반영 부분을 결정합니다.

예를 들어, 그림2.2의 (a)패턴을 구성하기 위해서는 작업물 크기 비가 폭(W): 넓이(L) = 3:2일 때 그림2.2의 (a)과 같은 패턴 모양이 구성됩니다. 작업물의 비가 맞지 않을 경우, 그림2.2의 (b), (c), (d), (e)의 패턴 모양이 구성될 수 있으며, 사용자 설정에 따라 다른 형태의 패턴이 구성됩니다.

그림 2.2 패턴을 구성하기 위한 작업물 크기 비
외곽선 정렬(파란색선 외곽으로 정렬 )인 경우,그림 2.2의 (b), (d)의 형태로, 중심 정렬(빨간색선 중심으로 정렬)인 경우, 그림2.2의 (c), (e)의 형태로 패턴이 구성됩니다.
(6) 적재 총 단수 = [ 1]단
쌓을 총 단수를 설정합니다. 설정할 수 있는 최대값은 100입니다.
설정범위는 1 ~ 100입니다.
(7) 짝수단 회전각 = <0, 90, 180>도
작업물의 무너짐 방지를 위해 짝수단에서 적절하게 패턴 전체를 회전하여 적재함을 합니다. 짝수단은 기본 패턴에 대해 0,90,180도 회전 가능합니다. 일반적으로, 홀수단에 대하여 짝수단은 180도 회전 적재합니다.

그림 2.3 짝수단 회전각
※ 참고사항
l 예를 들어 그림2.3의 (a)패턴을 설정하였을 때, 짝수단은 그림 2.3의 (a)를 기준으로 0°, 90°, 180°회전 가능합니다. 그림 2.3의 (b)는 그림2.3의 (a)패턴을 180°회전한 것을 나타내며, 그림 2.3의 (c)는 작업물이 쌓여 가는 모습을 보여주고 있습니다.
(8) 작업물 진입방향 = <0, 1, 2, 3>
작업물 적재 시, 적재순서를 결정하기 위해 작업물 진입방향을 결정합니다.
작업물 진입방향을 설정하여, 작업 순서를 결정하는 이유는
ü 작업물을 쌓을 때, 작업물간 상호 간섭을 피하기 위함입니다.
ü 또한 핸들링 툴에 따른 간섭을 피하기 위함입니다.
작업물 진입방향 선택은 최초 수행될 작업물의 반대 방향을 원칙으로 합니다.

그림 2.4 작업물 진입 방향 선택
적재순서는 작업물 진입방향에 따라 4가지 중 하나로 결정됩니다. 그림 2.4의 0,1,2,3은 작업물의 진입방향이며, 각 작업물들을 팔레트 위에 놓기 전 접근스텝 방향을 의미합니다.
최초 작업물이 “1” 인 경우, 작업물 진입방향을 화살표 “0”으로 선택합니다.
작업물을 쌓는 작업물 번호순서는 1 → 2 → 3 → 4 → 5
최초 작업물이 “3” 인 경우, 작업물 진입방향을 화살표 “1”로 선택합니다.
작업물을 쌓는 작업물 번호순서는 3 → 2 → 1 → 5 → 4
최초 작업물이 “5” 인 경우, 작업물 진입방향을 화살표 “2”로 선택합니다.
작업물을 쌓는 작업물 번호순서는 5 → 4 → 3 → 2 → 1
최초 작업물이 “4” 인 경우, 작업물 진입방향을 화살표 “3”으로 선택합니다.
작업물을 쌓는 작업물 번호순서는 4 → 5 → 1 → 2 → 3
팔레타이즈를 수행 진입 방향에 따른 작업 순서입니다.
짝수단에서도 진입방향의 결정에 맞는 순서로 팔레타이즈가 진행됩니다.
※ 주의사항
l 팔레타이즈 프로그램을 티칭하기 전, 적재방향을 먼저 정의하시고, 이 점을 고려하여 필이 프로그램을 티칭하여 주십시오.
l 작업물 티칭은 핸드가 척킹 혹은 포킹인 경우, 타 작업물에 간섭이 발생할 수 있으므로 패턴 매뉴얼의 표시대로 티칭해야만 합니다.
※ 참고사항
l 팔레트에 놓일 작업물 위치를 기준으로 전 스텝의 접근 방향이1/4분 면일 때, 작업물 진입방향을 “0”으로 설정하십시오. (그림2.5 (a) 참고사항1 참조)
l 팔레트에 놓일 작업물 위치를 기준으로 전 스텝의 접근 방향이2/4분 면일 때, 작업물 진입방향을 “1”로 설정하십시오. (그림2.5 (b) 참고사항2 참조)
l 팔레트에 놓일 작업물 위치를 기준으로 전 스텝의 접근 방향이3/4분 면일 때, 작업물 진입방향을 “2”로 설정하십시오. (그림2.5 (c) 참고사항3 참조)
l 팔레트에 놓일 작업물 위치를 기준으로 전 스텝의 접근 방향이4/4분 면일 때, 작업물 진입방향을 “3”로 설정하십시오. (그림2.5 (d) 참고사항4 참조)
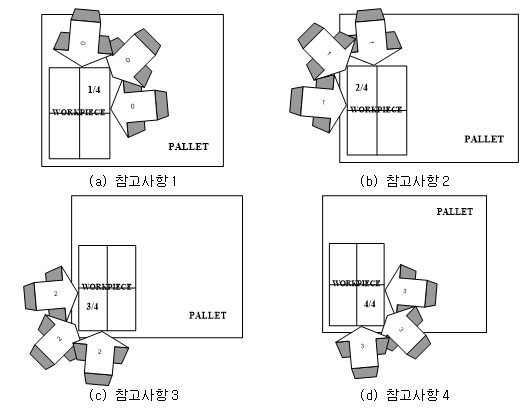
그림 2.5 참고사항
(9) 적재 단높이 편차보정 (+: 높아짐, -: 낮아짐)
작업물의 질량 또는 부피에 의해 작업물 적재 높이가 변할 수 있습니다. 이때 발생하는 작업물의 불규칙적인 높이 변화량을 일정한 량만큼 단마다 보정하기 위해 설정하는 항목들입니다. 실제 작업물 높이(Height)에 의해 계산되는 총 높이와 현장에서 쌓아놓은 작업물의 총 높이의 차이를 알아야 합니다.
ü 계산된 적재높이(Hi) = 실 작업물 높이 (H) × 적재 총 단수
ü 현장측정 적재높이(Hr) = 작업물을 쌓은 후, 측정한 높이
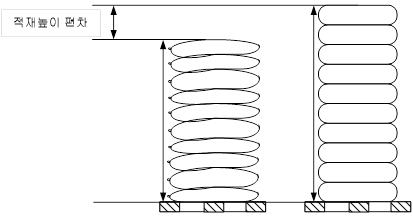
그림 2.6 Hr과 Hi 편차 (적재높이)
적재 단높이 편차보정 = (현재 작업단 수 – 편차보정 시작) X 평균 편차량)K
그림2.6은 실제 작업물을 쌓았을 때 높이와 계산된 작업물의 총 높이의 차이(적재높이 편차)를 나타내고 있습니다.
- 편차보정 시작단 = [ 1]단
: 단높이 편차를 보상을 위해 평균 편차량을 반영할 시작 단수를 입력합니다.
설정범위는 1 ~ 100입니다.
- 평균 편차량(MdH) = [ 0.0]mm
: 계산된 적재높이와 현장측정 적재높이의 차이의 평균값입니다.

설정범위는 -255.0 ~ 255.0 입니다.
- K(상수) = [ 1]
: 단 높이 변화 정도에 따라 K값을 조정하여 편차를 보상합니다.
: 설정범위는 1 ~ 3입니다.
※ 참고사항
l 단 높이 변화를 고려하지 않으면, 적재 불가능한 단을 편차적용 시작 단으로 설정하시오.
l 단 높이 변화가 특정 단에서 급격히 변화할 경우 2 또는 3을 설정하시고, 단 높이 변화가 선형적으로 변화될 경우 1로 설정하여 사용하십시오.
※ 주의사항
l 단 높이가 커질수록 작업물을 놓을 위치는 처음 작업물의 높이(Height)오차보다 크게 발생되며 작업물 안전하게 적재하는데 문제가 있을 수 있습니다.

그림 2.7 작업물 질량에 의한 단 높이 변화
ü H: 작업물의 높이
ü h: 작업물의 질량 또는 부피에 의한 변화량
l 적재 단 높이 편차 보정은 작업물을 안전하게 적재하는데 있어서 변화되는 적재높이 편차를 보상하기 위해 설정하는 값입니다. 그러므로 사용자 판단 하에 적절한 값을 설정하여 안전하게 적재할 수 있는 최적의 환경을 만드십시오.
(10) 핸들링 툴 = <포킹, 버큠>
: 이 항목을 설정하는 경우는 두 가지가 있습니다.
ü 핸들링 툴 종류에 따른 작업물을 집는 위치 변화하는 경우
ü 작업물 크기 변화에 따른 작업물을 집는 위치 변화하는 경우
로봇이 작업물을 집는 위치 변화에 대응해야만 합니다.


(a) 작업물 잡는 위치(PK)변화 (b) 사용자 좌표계 설정을 위한 티칭 방법
그림 2.8 작업물 질량에 의한 단 높이 변화
작업물 집는 위치 변화에 대한 대응 방법은 다음과 같습니다.
ü “핸들링 툴”을 “버큠”으로 선택합니다.
ü “사용자 좌표계”를 티칭합니다.
ü 티칭한 “사용자 좌표계”를 설정합니다.
※ 주의사항
l “핸들링 툴”이 “버큠”인 경우에만 픽킹 스텝(PK)에 “사용자 좌표계”가 적용됩니다.
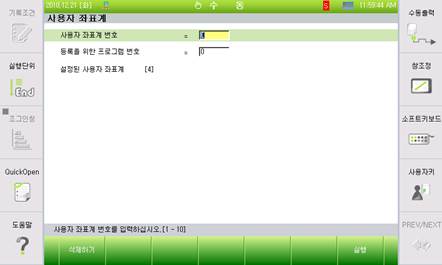
(11) 사용자 좌표계 = [ 0]번
사용자 좌표계는 “핸들링 툴”을 “버큠”으로 설정하였을 때만 사용할 수 있으며, 이 “사용자 좌표계”가 적용되는 스텝은 스텝조건이 “PK”인 스텝에만 적용됩니다. (PK는 작업물을 집는 것(픽킹)을 말합니다. ) 설정범위는 1 ~ 10입니다.
사용자 좌표계 등록(사용자 좌표계 정의를 위한 3개의 기준 스텝 티칭 방법, 그림2.8참고)
ü 스텝 1: 사용자 좌표계의 원점을 정의합니다.
ü 스텝 2: 사용자 좌표계의 X축을 정의하는 스텝을 정의합니다.
ü 스텝 3: 사용자 좌표계의 XY평면을 정의하는 스텝으로서 Y축과 Z축의 방향을 결정합니다.
수동모드의 『[F2]: 시스템』→『2: 제어 파라미터』→『7: 좌표계 등록』→『1: 사용자 좌표계』를 선택합니다. 등록하려는 좌표계 번호와 해당 사용자 좌표계data를 생성하기 위한 3점이 teaching되어 있는 프로그램의 번호를 입력하고 『[F7]: 실행』키를 누르면 좌표계의 등록이 수행됩니다.
※ 주의사항
l 좌표계 생성 시, 오른손을 기준으로 티칭하여 주십시오.
※ 참고사항
l 사용자 좌표계는 총 10개까지 등록이 가능합니다.
l 좌표계 정의를 위한 기준점의 기록 시 주의사항
ü 기준 3점이 동일 직선상에 존재하지 않아야 합니다.
ü 기준 3점간의 거리가 지나치게 가깝지 않아야 합니다.
ü 스텝 4번 이후의 스텝들은 좌표계 등록에 아무런 영향을 미치지 않습니다.
(12) 작업물 정보
기준 작업물 크기를 설정합니다. 기준 작업물의 크기를 설정하는 이유는 다음과 같습니다.
다양한 크기의 작업물에 대해 기준 작업물에 대해 실작업물을 잡는 위치와 놓는 위치를 계산하기 위해 입력합니다
작업물의 크기에 따라 패턴모양이 변하는 것을 막기 위함입니다.
기준 작업물의 Size를 측정하여 정확한 값을 입력하셔야만 합니다.
- 폭(Width)(항상, W>L) = [ 0.1]mm
작업물의 사이즈 중 폭을 설정합니다. 당사 팔레타이즈 기능은 항상 작업물의
긴 면을 폭(W)으로 설정해야만 합니다.
- 넓이(Length) = [ 0.1]mm
작업물의 사이즈 중 넓이를 설정합니다.
- 높이(Height) = [ 0.1]mm
작업물의 사이즈 중 높이를 설정합니다.
설정범위는 0.1 ~3000.0 입니다.
※ 주의사항
l 기준 작업물 크기는 팔레타이즈 쉬프트(PAL, M96)의 실 작업물의 크기의 기준이 되며, 이를 입력하지 않으시면, 패턴을 만들기 위한 위치 쉬프트 값이 발생하지 않습니다. 꼭 입력하여야 합니다.
(13) 팔레트 정보
- 팔레트의 각축별 경사각(Θx, Θy, Θz)
작업물을 쌓을 때 팔레트의 기울어짐을 고려하여 기울어진 량만큼을 보정합니다. 보정량은 쉬프트량에 가감되어 반영됩니다. 팔레트의 경사각을 측정하여 측정된 값을 입력합니다.
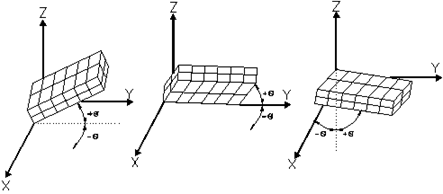
그림 2.9 X, Y, Z축에 대한 팔레트 경사각 방영에 의한 패턴 쉬프트량 변화
- 팔레트 경사각 측정 방법
컨베이어의 기울기, 지면이 평평하지 못한 현장조건에서 팔레트의 기울어진 경사각을 측정한다는 것이 어렵고, 측정하였다 해도 그 결과의 오차 정도를 믿을 수 없습니다. 이를 감안하여, 팔레트 경사각을 자동 계산할 수 있는 기능을 보유하고 있습니다. 이를 통해 쉽게 팔레트의 기울기를 구할 수 있습니다.

그림 2.11 경사각 측정 프로그램 티칭 스텝
ü 스텝 1: 팔레트와 초기 작업물이 놓일 위치 스텝을 기록합니다.
ü 스텝 2: 팔레트의X 축 방향(로봇 좌표계 기준)으로 스텝을 기록합니다.
ü 스텝 3: 팔레트의Y 축 방향(로봇 좌표계 기준)으로 스텝을 기록합니다.
① 『[F2]: 시스템』 → 『4: 응용 파라미터』 → 『3: 팔레타이징』을 선택합니다.
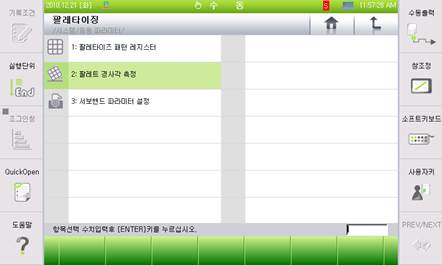
② 『2: 팔레트 경사각 측정』을 선택합니다.
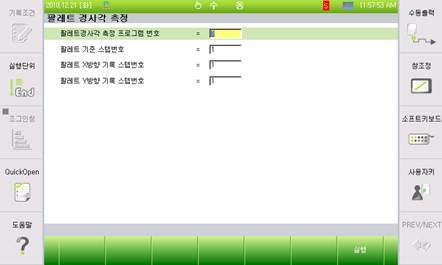
③ 항목입력
n 팔레트경사각 측정 프로그램번호:
경사각 측정을 위해 작성된 프로그램 번호를 입력합니다.
n 팔레트 기준 스텝 번호: “1”을 입력합니다.
n 팔레트 X방향 기록 스텝번호: “2”를 입력합니다.
n 팔레트 Y방향 기록 스텝번호: “3”을 입력합니다.
④ 항목입력이 끝난 후, [실행] 키를 누르십시오.
⑤ 표시된 X deg, Y deg, Z deg를 표기해 놓으십시오.
⑥ 표기한 각 축 경사각을 『팔레타이즈 패턴레지스터』에 『팔레트 경사각』을 차례로 입력하면 됩니다.
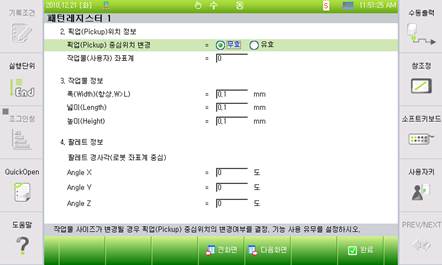
n Angle X = [ 0.00]도
: 로봇 좌표계 X축을 중심으로 기울어진 값을 입력합니다.
n Angle Y = [ 0.00]도
: 로봇 좌표계 Y축을 중심으로 기울어진 값을 입력합니다.
n Angle Z = [ 0.00]도
: 로봇 좌표계 Z축을 중심으로 기울어진 값을 입력합니다.
: 설정범위는 -180.00° ~ 180.00°입니다.
※ 주의사항
l “팔레트면” 위에 접하도록 스텝을 기록 할 때만 정확한 경사각을 구할 수 있으며, 핸들링 툴이 장착된 상태에서 스텝을 기록하신다면, 최저 속도로 로봇의 툴을 움직여 기록하십시오.
다음은 이렇게 기록한 프로그램을 바탕으로 편집모드로 이동합니다.
l 좌표계 생성 시, 왼손을 기준으로 티칭하여 주십시오.
※ 참고사항
l 팔레트 경사각 측정에 의한 측정 결과 값은 단 한번만 보여집니다. 측정한 값을 꼭 표기 해놓기 바랍니다. 물론 『팔레트 경사각 측정』에 입력항목을 다시 입력하면 볼 수 있습니다.
l 팔레트 경사각 측정한 값의 범위가 -180°~ 180°이며, 값 입력 범위 또한 -180°~ 180°이므로 측정값이 항상 오른손을 기준으로 측정되었는지 확인 바랍니다.
(14) 간지삽입
여러 단의 작업물을 쌓을 경우, 단과 단 사이에 간지를 삽입합니다. 간지삽입의 목적은
ü 작업물과 작업물 사이의 작업물 보호
ü 일정하지 않은 작업물의 높이로 인한 쌓여있는 작업물의 무너짐을 방지
ü 습기에 민감한 작업물에 방습 효과
등의 이유로 간지를 삽입하게 됩니다.
간지삽입기준 = [ 0]단 마다
: 간지를 삽입하는 기준을 설정합니다. 몇 단마다 간지를 삽입 할 것인지를 정합니다.
: 설정범위는 1 ~ 100 입니다.
마지막 간지삽입 여부 =<무효, 유효>
: 마지막 단에 간지 삽입 여부를 판단합니다.
간지두께 = [ 0.1]mm
: 간지 두께를 입력합니다. 팔레타이즈 작업 시, 간지 삽입 다음 단의 높이를 자동으로 산출합니다. 설정범위는 0.1 ~ 500.0 입니다.


(a) 간지삽입 (b) 간지두께
그림 2.11 간지삽입/간지두께
그림2.11 (a)는 적재 패턴 매단 마다 간지가 삽입되어 있음을 보여주고 있으며,그림2.12 (b)는 간지의 두께를 보여주고 있다.
※ 참고사항
l 팔레타이즈 작업시 간지 삽입은 팔레트 바로 윗면부터 사용은 불가합니다. 디팔레타이즈 작업시, 역시 최상단 역시 작업 불가합니다.
l 각 항목 입력 후, 『[F7]: 완료』키를 눌러야만 입력한 값이 저장됩니다.