6.1. 시스템 설정
6.1. 시스템 설정
(1) 『[F2]: 시스템』 → 『5: 초기화』 → 『7: 유닛설정』에서 부가축 MOVE독립 기능 설정을 위한 포지셔너에 유닛 번호를 부여합니다. 아래와 같은 경우 메커니즘 1번이 유닛1번에 유닛2번에 메커니즘 2번이 그리고 유닛3번에 메커니즘 3번이 설정된 것입니다.
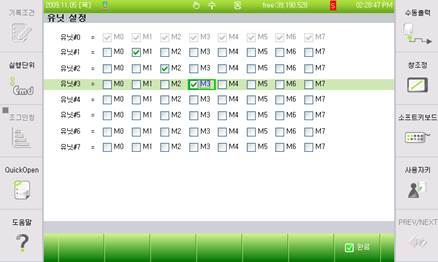
(2) 유닛 설정이 완료되면 전원을 재 투입합니다.
(3) 『[F2]: 시스템』 → 『4: 응용 파라미터』 → 『10: 명령문 독립실행』을 선택하여 명령문에 MOVE명령을 기록합니다.
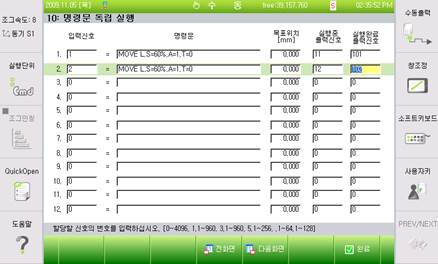
입력신호: 해당 신호가 들어온 경우 입력신호가 ON되어 있는 동안 명령문을 실행함
목표위치: 해당사항 없음.설정 불필요
실행중 출력신호: 부가축 MOVE독립 명령으로 이동중인 경우에 외부에 출력할 신호번호
실행완료 출력신호: 실행이 완료되었을 때 출력신호
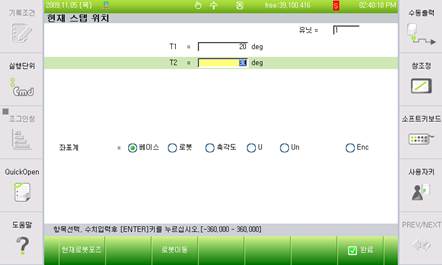
(4) MOVE명령을 선택하고 Quick Open키를 누르면 위치를 편집할 수 있습니다. 이때 구동하고자 하는 유닛 번호를 선택하고 이동 위치를 기록합니다.
(5) 부가축 MOVE독립 실행을 수행할 축을 AXISCTRL OFF명령으로 설정합니다. 외부 입력 신호에 의한 MOVE독립 실행은 AXISCTRL OFF~AXISCTRL ON사이에 해당하는 부분에서만 유효합니다.
(6) 프로그램 작성 예
AXISCTRL OFF,T7,T8 → 스테이션1의 독립조작 종료 후 진행(대기시간5초)
S1 MOVE L,S=300mm/s,A=0,T=0
S2 SMOV S1,L,S=100mm/s,A=0,T=0
S3 SMOV S1,L,S=100mm/s,A=0,T=0
S4 MOVE L,S=300mm/s,A=0,T=0
S5 SMOV S1,L,S=100mm/s,A=0,T=0
AXISCTRL ON,T7,T8 → 스테이션2의 독립조작 종료 후 진행
AXISCTRL OFF,T9
S6 MOVE L,S=300mm/s,A=0,T=0
S7 SMOV S1,L,S=100mm/s,A=0,T=0
S8 MOVE L,S=300mm/s,A=0,T=0
S9 SMOV S1,L,S=100mm/s,A=0,T=0
AXISCTRL ON,T9 → 모든 스테이션의 독립조작 종료 후 진행
S10 MOVE P,S=100%,A=0,T=0
S11 MOVE L,S=1200mm/s,A=0,T=0
S12 MOVE L,S=200mm/s,A=0,T=0