1.1. 서론
1.1. 서론
서보프리 기능은 로봇에 작용하는 외력에 반응하여 로봇 툴이 자연스럽게 밀릴 수 있는 기능으로 소프트웨어적으로 동작하기 때문에 기능을 사용함에 있어 힘센서 등 추가적인 하드웨어가 필요 없습니다. 서보프리 기능이 없는 (또는 서보프리 기능이 비활성화된) 로봇은 계획된 지령을 충실히 추종하도록 제어되기 때문에 외력이 가해져도 밀리지 않습니다. 따라서 사출기 성형품 취출 작업과 같이 사출기 이젝터의 움직임에 맞춰 로봇 툴이 자연스럽게 밀리기 위해서는 서보프리 기능이 필요합니다.
외력에 대해 밀릴 수 있는 방향은 제어기에서 제공하는 좌표계 중 하나의 축 방향이며, 사용자(User) 좌표계를 이용해 공간상 임의의 직선을 따라 로봇이 밀리게 할 수 있습니다. 로봇이 밀리는 동안에 툴 자세는 바뀌지 않으며, 서보프리 기능이 활성화되기 직전의 툴 자세를 유지하며 밀리게 됩니다.
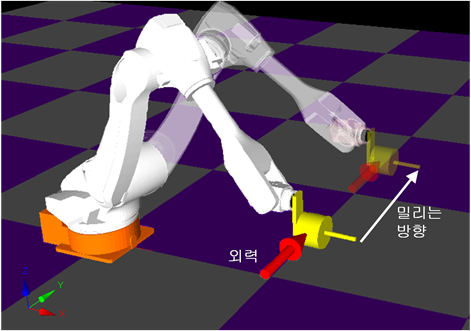
그림 1.1 서보프리 예 (로봇좌표계의 +Y 방향으로 기능을 활성화한 경우)