2.3. 서보프리 기능 사용방법
2.3. 서보프리 기능 사용방법
1단계 : 서보프리 기능 동작여부 확인
서보프리의 세부 게인을 튜닝하기 전에 사용 로봇에서 서보프리 기능이 동작하는지 확인합니다. 로봇에 외력을 가하지 않아도 로봇이 움직이게 만들기 위해 가장 큰 민감도(GAIN=100)와 가장 작은 외란문턱값(F=1)으로 설정합니다.
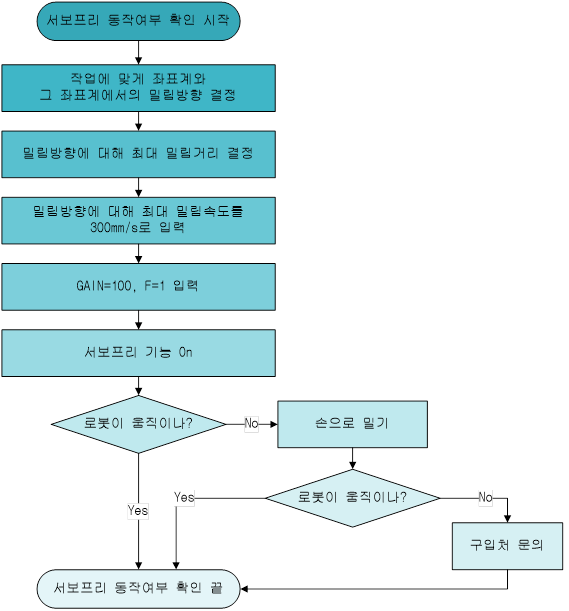
그림 2.2 서보프리 기능 동작여부 확인 순서도
S1 MOVE P,S=10%,A=1,T=1 DELAY 2.0 LIMIT POS,+Y=500 LIMIT VEL,Y=300 ServoFree ON,CRD=1,DIR=+Y,GAIN=100,F=1 DELAY 10 ServoFree OFF END |
그림 2.3 서보프리 기능 동작여부 확인 프로그램 예
2단계 : 작업에 맞춰 세부 게인 튜닝
사용 로봇에서 서보프리 기능이 동작함을 확인한 후 작업에 알맞도록 세부 게인을 튜닝합니다. 서보프리 기능을 on 한 후 외력이 없는 상태에서 로봇이 움직이지 않도록 외란문턱값 F를 1부터 점차 증가시킵니다. 그 후 작업에 알맞은 민감도를 얻을 때까지 민감도게인 GAIN을 조절하고, 밀리는 속도에 따라 최대 밀림속도를 조절합니다.

그림 2.4 서보프리 기능 게인 튜닝 순서도