3.1. 특기 사항
3.1. 특기 사항
(1) 외력에 가장 민감하게 반응하는 방향은 로봇좌표계의 좌우방향(±Y)입니다. 서보프리 작업을 위해 로봇 툴이 로봇좌표계의 +Y 또는 -Y 방향으로 밀리도록 로봇을 설치할 것을 추천합니다.
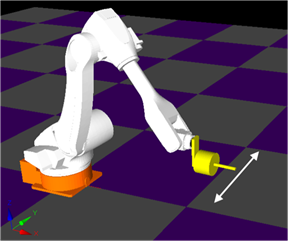
그림 3.1 서보프리 추천 방향
(2) 로봇이 특정 스텝으로 이동 후 곧바로 서보프리를 on할 경우 외력 추정오차가 커질 수 있습니다. 서보프리 기능을 활성화시키기 전에 2초 정도 시간지연(DELAY 2.0)을 입력하는 것이 좋습니다.
(3) 최대 밀림속도는 로봇을 미는 속도보다 크거나 같게 설정돼 있어야 합니다. 최대 밀림속도가 로봇을 미는 속도보다 작게 설정돼 있을 경우, 로봇에 과도한 외력이 가해져 기구부가 파손될 수 있습니다. 설정 가능한 최대 밀림속도는 300mm/s입니다.
(4) 최대 밀림거리까지 밀린 상태에서 계속하여 로봇 툴을 밀 경우,로봇에 과도한 외력이 가해져 기구부가 파손될 수 있습니다. 따라서 로봇 툴이 실제로 밀릴 거리보다 크게 최대 밀림거리를 설정해야 합니다. 설정 가능한 최대 밀림거리는 1,000mm입니다.
(5) 툴중량 오차 등의 영향으로 외력이 사라진 후에도 로봇 툴이 정지하지 않고 계속 밀려나갈 수 있으며, 이 경우 로봇 툴과 주변장치가 충돌할 위험이 있습니다. 최대 밀림거리를 알맞게 설정함으로써 외력이 사라진 후 로봇 툴이 계속 밀려나가다가도 일정 거리 내에서 정지하게 만들 수 있습니다.
(6) 서보프리 티칭 프로그램에 사용되는 툴번호의 부하정보에는 그리퍼와 그리퍼로 핸들링할 workpiece를 포함한 정보를 입력해야 합니다. 수동으로 정확한 부하정보를 입력하기 어려운 경우 '부하추정' 기능을 사용할 것을 추천합니다.