3.2. 사출물 핸들링 작업 예
3.2. 사출물 핸들링 작업 예
서보프리 기능을 이용해 사출기 사출물을 핸들링하는 작업을 수행하는 순서는 다음과 같습니다.
(1) 사출물을 잡기 위해 P1 위치로 로봇을 움직입니다.
(2) 그리퍼를 닫아 사출물을 잡습니다.
(3) 서보프리 초기조건을 설정하고 기능을 on 합니다.
(4) 사출기에 사출시작 명령을 전달합니다.
(5) 사출기 이젝터가 사출물을 미는 동안 설정된 밀림방향을 따라 밀립니다. (P1→P1')
(6) 사출작업 완료 신호를 대기합니다.
(7) 서보프리 기능을 off 합니다.
(8) 사출물을 P2 위치로 옮깁니다.
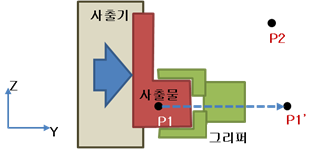
그림 3.2 사출물 핸들링 작업
위 작업에 해당하는 작업 프로그램은 다음과 같습니다.
구분 | 프로그램 |
사출기로 이동 | MOVE P,P1,S=50%,A=1,T=1 |
그리퍼 닫기 | DO1=1 |
시간 지연 | DELAY 2.0 |
서보프리 조건설정 & 기능 개시 | LIMIT POS,+Y=500 LIMIT VEL,Y=300 ServoFree ON,CRD=1,DIR=+Y,GAIN=50,F=50 |
사출시작 명령 | DO10=1 |
사출작업완료 대기 | WAIT DI1 |
기능 종료 | ServoFree OFF |
사출물 이송 | MOVE P,P2,S=100%,A=1,T=1 |