4.1. 협조제어 시스템 일괄 조작 사양
4.1. 협조제어 시스템 일괄 조작 사양
협조제어 시스템은 1대의 Master 시스템과 1~3대의 Slave 시스템으로 구성됩니다. 일반적으로 협조제어 시스템은 각 시스템마다 별도의 티치펜던트가 연결되어 있으나 본 기능을 사용 시 1개의 티치펜던트로 각 시스템을 각각 제어할 수 있습니다.
협조제어 시스템 일괄 조작의 동작 조건은 다음과 같습니다.
(1) 티치펜던트가 연결된 제어기의 수동모드 협조제어가 ‘Master’로 설정’
(2) 티치펜던트가 분리된 제어기의 수동모드 협조제어는 ‘Slave’로 설정’
(3) 티치펜던트가‘Slave’로 설정된 제어기와 연결 시 해당 시스템 단독 조작만 가능.
아래 표는 일괄 조작으로 수행할 수 있는 버튼 목록입니다.
버튼 명칭 | 버튼 모양 | 설 명 |
Motor On |
| 로봇 각 축의 모터에 서보 전원을 공급하는데 사용하는 버튼입니다. 이 버튼을 눌러 [MOTOR ON] 상태가 되면 수동모드에서는 [MOTOR ON]램프가 점멸되고 자동모드에서는 [MOTOR ON]램프가 점등됩니다. |
Start |
| 작성된 프로그램을 자동 운전시키기 위해 사용하는 버튼입니다. 로봇의 자동운전이 시작되면 [START]램프가 점등되고 [STOP]램프가 소등됩니다. |
Stop |
| 자동운전중인 로봇을 일시적으로 정지하기 위해 사용하는 버튼입니다. 로봇이 정지되면 [STOP]램프가 점등되고 [START]램프가 소등됩니다. 로봇은 원래 계획되어 있는 경로상에서 정지하므로 주변장치와의 충돌위험은 없습니다. |
Select |
|
|
Emergency Stop |
| 로봇이 동작 중 주변장치와 충돌할 위험이 있는 긴급한 상황에서 사용합니다. 로봇의 모터에 서보 전원을 차단하는 MOTOR OFF를 위한 버튼이며 [MOTOR ON]램프가 소등됩니다. ※ 이 버튼은 설정과 무관하게 일괄 조작됩니다. |
Step Forward/ Backward |
| 수동 모드에서 작업 프로그램을 명령 단위나 스텝 단위, 또는 프로그램 끝까지 한번에 전진 또는 후진할 때 사용합니다. |









일괄 조작을 위한 조건을 만족하기 위해서는 하기와 같은 설정을 만족해야 합니다.
(1) TP가 Master로 동작할 로봇과 연결
(2) Master 로봇의 수동모드 협조제어 상태가 Master로 설정되어야 합니다.
① 수동모드 협조제어 상태는 [R..]+[351] 입력 후 0~3을 입력하여 설정 가능합니다.
Master로 설정하기 위하여 1을 입력합니다.
(0: Individual, 1: Master, 2: Slave, 3: CMOV 기록모드)
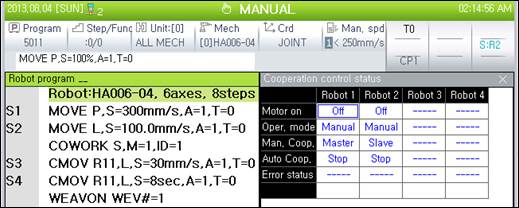
② 정상적으로 설정된 경우 하기 그림의 표시 부분과 같이 티치펜던트 우측 상단에 현재 수동모드 협조제어 상태가 표시됩니다.
(3) 일괄 조작으로 함께 동작할 Slave 로봇의 수동모드 협조제어 상태를Slave로 선택
① [R..]+[351] 입력 후 2를 입력하여 수동모드 Slave로 설정합니다.
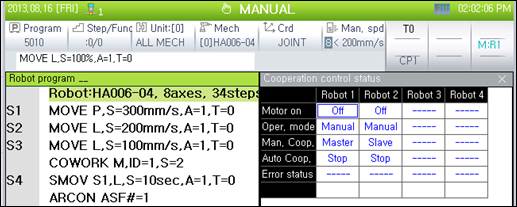
② 정상적으로 설정된 경우 하기 그림과 같이 티치펜던트 우측 상단에 현재 수동모드 협조제어 상태가 표시됩니다.