4.2. 협조제어 시스템 일괄 조작 예시
4.2. 협조제어 시스템 일괄 조작 예시
다음은 2대의 로봇을 이용한 협조제어 시스템에서 티치펜던트 공유기능을 이용한 조작의 예시입니다.
협조제어를 위한 네트워크(HiNet) 설정 및 공통좌표계 설정은 이미 완료된 상태에서 일괄 조작만을 설명합니다.
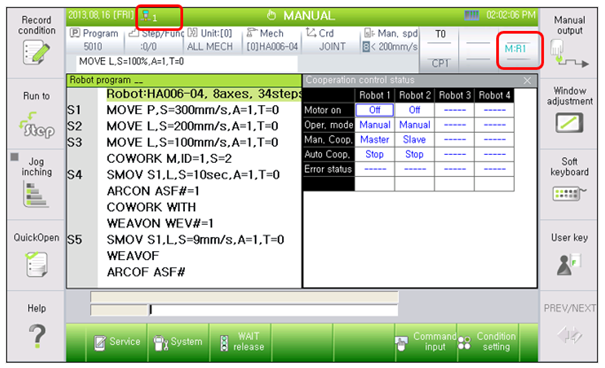
1번 로봇(Master)에서[R..]+351 입력 후 1을 입력하여 수동모드Master를 설정합니다.
[SHIFT]+5를 눌러 티치펜던트 연결을 Slave로 사용할 2번 로봇으로 변경합니다.
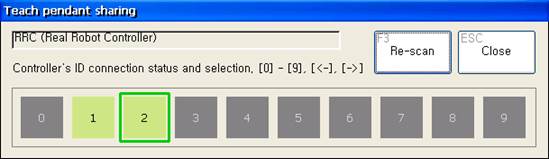
2번 로봇(Slave)에서[R..]+351 입력 후 2를 입력하여 수동모드Slave를 설정합니다.
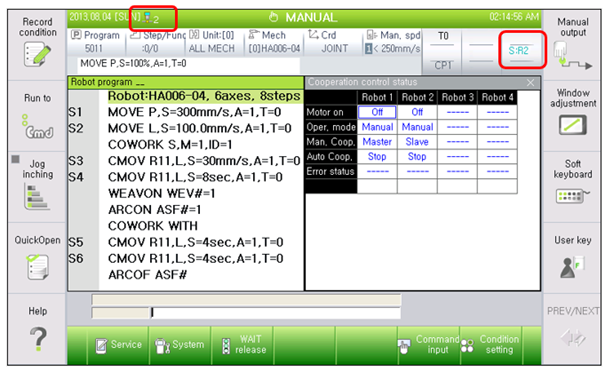
다시 [SHIFT]+5를 눌러 티치펜던트 연결을 1번 로봇으로 변경합니다.
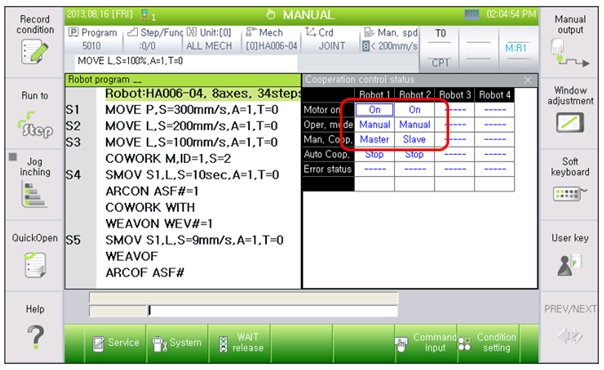
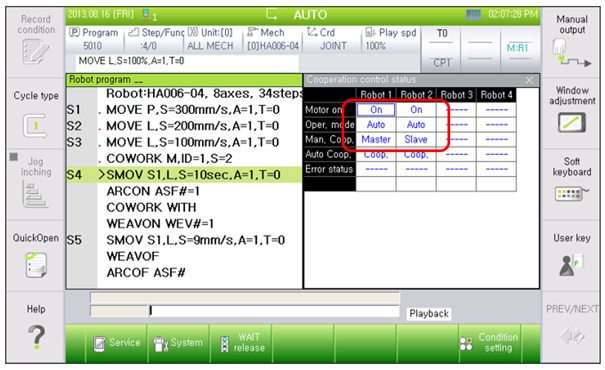
[Motor On]버튼을 누른 후 티치펜던트 의 인에이블 스위치를 눌러 Slave 로봇의 모터 ON 여부를 확인합니다.
[Select] 스위치를 ‘자동(AUTO)’으로 변경 후 [Start] 버튼을 눌러 협조제어 작업을 수행합니다.
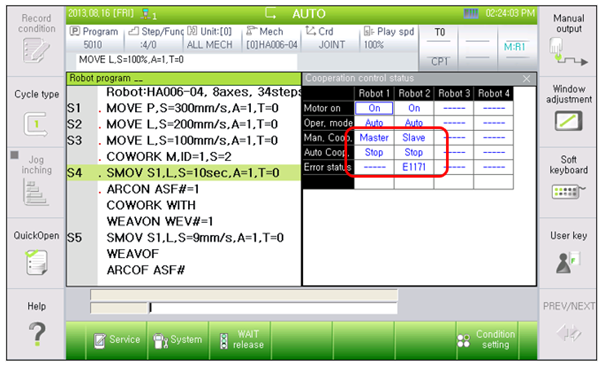
현재 티치펜던트가 연결되지 않은 제어기에서 에러가 발생하는 경우 ‘협조제어 상태’ 모니터링 창에 ‘에러상태’가 출력됩니다.
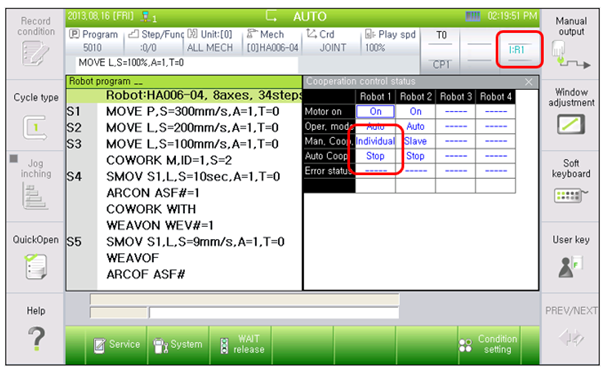
협조제어 시스템 일괄 조작을 해제하여 로봇을 단독으로 조작하려면 [R..]+351 입력 후 0을 입력하여 수동모드 독립조작(Individual)으로 설정합니다.

본 기능설명서에는 협조제어 기능과 관련한 세부사항은 다루어져 있지 않습니다. 협조제어 기능에 대한 자세한 설명은 “Hi5 제어기 기능설명서: 협조제어”를 참고하십시오.
협조제어의 특성상 로봇 조작 시 주변 구조물과 간섭이 발생하기 쉽습니다. 로봇 재생 전 반드시 로봇들의 동작 영역을 확인하십시오.