5. 조건설정
운전조건 메뉴는 프로그램을 수정하지 않으면서 운전조건을 편리하게 변경할 수 있도록 합니다. 설정된 값들은 제어기의 전원을 재 투입 하더라도 유지됩니다.
수동 또는 자동모드의 초기화면에서 『[F7]: 조건설정』을 누르면 다음의 화면이 표시됩니다.
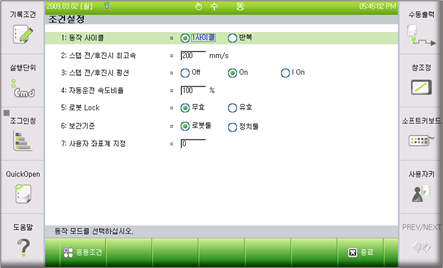

l 항목에 반전 바를 이동시킵니다. 수치를 입력하는 경우는 에디터박스에 숫자를 입력합니다. [숫자]키로 원하는 값을 입력한 후 [ENTER(YES)]키를 누르면 내용이 반영됩니다.
l 라디오 버튼으로 사용된 항목 중 하나를 선택하는 경우에는 [SHIFT]+ [좌/우]를 누르면 반전 바가 이동하며 즉시 반영합니다.
l 조건설정 데이터는 제어정수파일(ROBOT.CON)에 보관되어 있습니다.
l 제어정수파일(ROBOT.CON) 속성이 완전보호 되어 있는 경우에도 변경이 가능합니다.