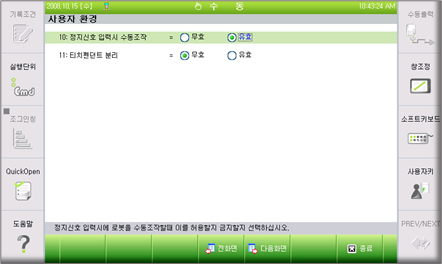
Hi5 제어기조작Hi5 제어기 로봇조작7. 시스템 설정7.1. 사용자 환경On this page7.1. 사용자 환경7.1. 사용자 환경 사용자가 각종 조건들을 설정하여 필요한 작업을 하는 기능입니다. 7.1.1. Pose기록 형태7.1.2. 자동모드 커서위치 변경7.1.3. 명령어 삭제 시 확인7.1.4. WAIT(DI/WI) 강제해제7.1.5. 프로그램 스트로브 신호 사용7.1.6. 재생 프로그램의 외부갱신7.1.7. 충돌센서7.1.8. P* 좌표계7.1.9. P* 선택7.1.10. 정지신호 입력 시 수동조작7.1.11. 티치펜던트 분리