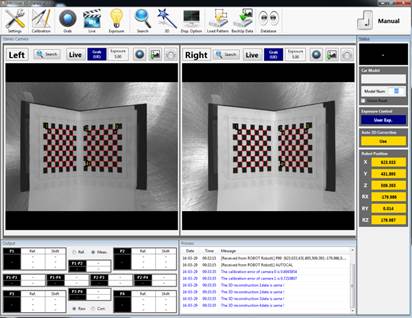
3.1.2. Manipulation Buttons
3.1.2. Manipulation Buttons
조작버튼은HRVision 3D-Stereo 의 주요기능을 조작하는 버튼으로 각 기능은 다음과 같습니다.

n Settings
각종 기능 및 연동 HW를 설정/관리하는 메뉴입니다. 다음과 같이 총 12개의 Sub 메뉴가 있습니다.
- System
카메라 종류,카메라 보정 방법, 결과 출력 방법, 통신 등을 설정합니다. 주변 설비 및 설치할 환경에 맞게 선택합니다.
- Serial Communication
주변 설비 및 설치할 환경에 맞게 시리얼 통신 변수를 설정합니다.

- Ethernet Communication
주변 설비 및 설치할 환경에 맞게 이더넷 통신 변수를 설정합니다.

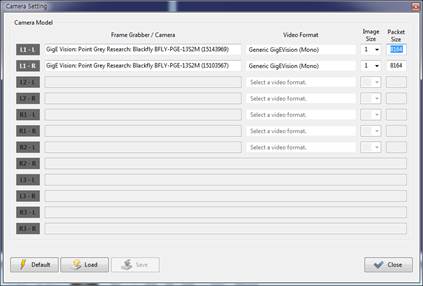
- Camera Setting
카메라 모델,연결 포트, 노출 등을 설정합니다.
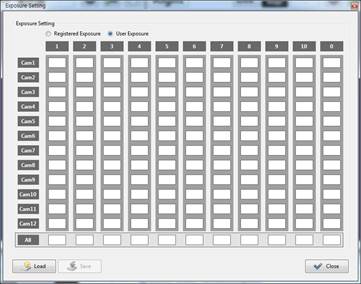
- Exposure Setting
각 카메라의 모델별 사용자 노출을 설정합니다.
- Model
차종 정보를 입력하고, “Save”버튼을 누르면 저장됩니다.

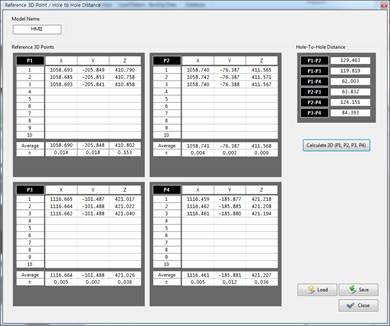
- Reference Points
측정된 4지점에 대한 작업물의 위치를 기준위치로 등록합니다.
- Auto 3D Correction
“All Points”를 선택하면 측정된 3차원 데이터를 보정하여 출력하고, “Non-Use”를 선택하면 보정하지 않은 데이터를 출력합니다. 기본 설정은 “Non-Use”입니다.
- Shift Offset Setting
모델별 시프트 오프셋을 설정합니다.

- Limit Setting
측정 데이터 범위, 측정된 특징점간 거리 오차 범위를 설정합니다.
- Limit
“Moving Distance Limit”은 측정된 특징점이 공간상에서 이동할 수 있는 한계거리를 나타내며, “Hole-to-Hole Distance Error”는 특징점간 거리의 오차 임계값을 나타냅니다. 만약 작업물의 3차원 위치가 기준 차체보다 “Moving Distance Limit”이상 이동하면 NG가 출력되며, 특징점간의 거리도 기준차체보다 임계값 이상 차이가 나도 NG가 출력됩니다.

- Password
Password 변경을 수행합니다.

- File Management
에러 발생 영상 저장 주기 및 삭제 시간을 설정합니다. 데이터 삭제는 시스템에 많은 부하를 줄 수 있으므로, 로봇이 작업을 하지 않는 새벽으로 삭제 시간을 설정하는 것을 권장합니다.

n Calibration
카메라 캘리브레이션 프로그램 로딩 및 로봇과 카메라와의 관계를 계산합니다.
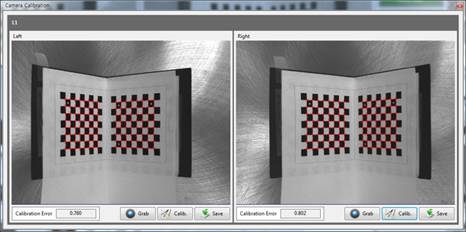
- Camera Calibration
스테레오 카메라 캘리브레이션 수행 다이얼로그가 로딩되며, 카메라의 투영행렬을 계산합니다. [Save] 버튼 클릭 시 투영행렬이 저장됩니다.
- Automatic Camera Calibration
자동으로 스테레오 카메라 캘리브레이션을 수행하며, 카메라의 투영행렬이 자동으로 계산하여 저장합니다.
- Robot-Camera Calibration
카메라 캘리브레이션을 위해 사용한 보정판과 로봇과의 관계를 계산합니다.

- Hand-Eye Calibration
로봇과 로봇에 부착된 카메라와의 관계를 계산합니다.

n Grab
클릭할 때마다 현재 보여지는 영상을 하나씩 획득합니다.
n Live Display
설치된 카메라로부터 “연속영상”이 보여집니다.
n Exposure
3가지 종류의 노출 자동 모드를 제공합니다.
- Registered Exposure
패턴 등록시에 사용된 노출로 영상을 획득합니다.
- Auto Exposure
패턴 등록시의 영상의 밝기와 현재 영상의 밝기가 유사하도록 노출을 자동으로 변경합니다. 이 모드 사용시 영상 획득 속도는 느려집니다.
- User Exposure
사용자가 설정한 노출로 영상을 획득합니다.
n Search
패턴이 등록되어 있을 경우, 영상을 획득한 후 패턴 인식 작업을 한번만 수행합니다.
n 3D
패턴이 등록되어 있을 경우, 영상을 획득한 후 패턴 인식 작업을 수행한 후 3차원 좌표값을 계산을 합니다.
n Disp. Option
패턴 인식 후 영상창에 표시되는 결과 출력 데이터의 표시 유무를 결정합니다.
- Score
패턴인식 결과의 정합율을 표시합니다.
- Pattern Region
패턴인식 영역을 표시합니다.
- Coordinate Axes
패턴인식 좌표축을 표시합니다.
- Origin
패턴인식 원점을 표시합니다.
- Center and Scale
Camera Setting 창에서 설정한 노출을 유지합니다.
- Center Guide Line
영상의 가운데에 십자선을 표시합니다.
n Load Pattern
등록된 패턴을 로딩합니다.
n BackUp Data
현재 설정한 패턴 데이터 및 캘리블이션 데이터를 “C:*HRVision Stereo*Backup” 폴더에 저장합니다.
n DataBase
에러 데이터 베이스 및 측정한 데이터 베이스 검색 창을 표시합니다.
검색된 데이터는 “Microsoft Excel” 프로그램과 연동하여 표시 가능합니다.

n Manual/Auto
Manual/Auto 모드를 변경합니다. Auto 모드에서는 모든 버튼이 조작 불가능하며 PLC 및 로봇과의 통신만을 통해서 조작이 됩니다.