2.2.1. 감속 정지
2.2.1. 감속 정지
사용자가 설정한 암 간섭 영역 및 툴 간섭 영역을 침범한 후에 감속 정지할 경우 감속 정지 거리 및 로봇의 관성 때문에 에러를 검지하더라도 로봇은 충돌할 수도 있습니다. 따라서 로봇의 속도를 고려하여 영역을 확장하여 간섭을 검지합니다.
아래의 그림은 로봇이 서로 접근하는 방향으로 이동하고 있는 경우 간섭예상 영역(Level2 검지 영역)이 생성되어 간섭을 미리 검지하는 개념입니다. 점선으로 표시된 영역이 간섭 예상 영역이고 실선으로 표시된 선이 사용자가 설정한 간섭 영역입니다.
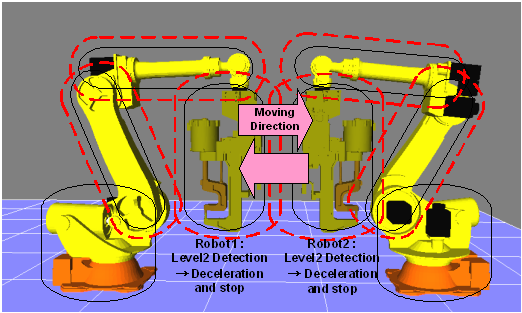
간섭 예상 영역은 로봇의 이동 속도와 정지 시간을 계산하여 그 거리만큼 자동으로 설정되지만 사용자는 그 최대 값을 ‘간섭 예상 최대 거리’로 설정 할 수 있습니다.
제어기에서 계산하는 간섭 예상 거리는 로봇이 고속으로 이동할 때는 여기에 설정된 간섭영역에 간섭 예상 최대거리를 더하여 간섭을 검지합니다. 간섭 예상 거리 구간에서는 감속 정지를 하게 되며 간섭 영역에 진입할 경우 감속 없이 즉시 정지합니다. 로봇이 저속으로 이동하여 제어기 내부에서 계산한 예상 거리가‘간섭 예상 최대 거리’보다 작은 경우에는 간섭 예상 최대 거리 이내에 들어오더라도 간섭 검지를 하지 않습니다.

발생 가능한 에러 원인 | 로봇이 이동 중에 다른 로봇의 간섭 예상 영역을 침범할 경우 아래와 같은 경고와 에러 메시지가 동시 발생하고 정지합니다. |
에러 메시지 | W0147 로봇 0)과 ARM 간섭이 예상되어 정지함 E0237 로봇 0)과 ARM간섭 영역 검지 |
조치 방법 | 정상적인 로봇 프로그램의 재생 중에 상기와 같은 경고가 발생할 경우 작업 프로그램을 다시 점검해 주십시오. |