2.1.1. 기능의 유효 무효 및 통신방식 설정
2.1.1. 기능의 유효 무효 및 통신방식 설정
큐브 간섭 방지 기능을 사용할지에 대한 유효 무효 여부를 설정합니다.
『[F2]: 시스템』 → 『4: 응용 파라미터』 → 『7: 간섭방지』→ 『1: 큐브 간섭 방지』→ 『1: 조건설정』를 선택하여 아래와 같이 기능의 사용 여부와 통신방식을 설정합니다.
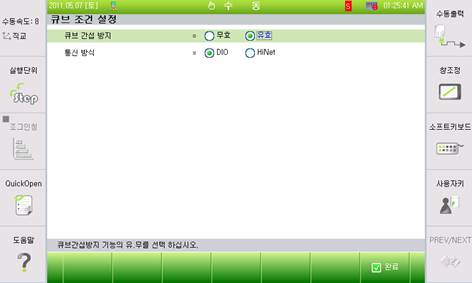
1) 큐브 간섭 방지 <유효,무효> : 본 기능의 유효/무효를 설정합니다.
큐브영역을 설정하고 간섭 방지 기능을 사용하기 위해서는 ‘유효’로 설정합니다. ‘무효’로 설정하는 경우에는 간섭영역 설정을 할 수 없고 신호 입출력 처리도 하지 않습니다.
2) 통신방식 <DIO,HiNet>: 큐브 간섭 검지 신호 입출력을 위한 통신을 선택합니다.
DIO로 설정하면 범용 입출력 신호를 설정해야 하고, HiNet인 경우에는 협조제어 네트워크를 연결해야 합니다
협조제어 네트워크는 『[F2]: 시스템』 → 『2: 제어 파라미터』 → 『9: 네트워크』→ 『3: 서비스』→ 『1: 협조제어』에서 협조제어 기능을 유효로 설정하고 그룹번호와 로봇 번호를 설정해야 합니다. 동일 그룹 내에서 로봇번호가 중복되지 않도록 주의하여 설정하십시오. HiNet 네트워크 상태는 [F1]: 서비스』 → 『1: 모니터링』 → 『10: 협조제어 데이터』→ 『2: HiNet I/O』 → 『[F5]: 전체 구성』으로 HiNet-IO 연결상태 창에서 확인 가능합니다. 초록색으로 표시된 로봇이 협조제어 네트워크에 참여한 로봇입니다.