2.1.3. 공통 큐브 영역에 대한큐브입출력신호설정
2.1.3. 공통 큐브 영역에 대한큐브입출력신호설정
공통 큐브 영역의 설정은 각 로봇 공간상의 동일한 영역에 설정되도록 해야 합니다. 동일한 영역으로 설정하기 위해서는 우선 두 로봇의 TCP위치를 정확히 설정한 후 공간상의 동일한 위치로 로봇TCP를 이동하여 큐브의 위치를 설정(대각점 설정방법, 중심점 설정방법 참조)하고 큐브의 크기 또한 동일하게 설정합니다.
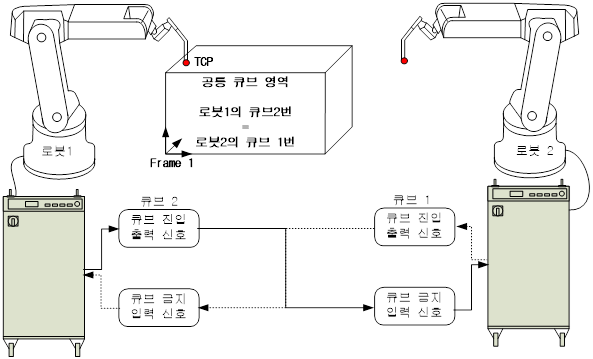
공통 큐브 영역에 대한 자동 상호 인터록 기능
상기의 그림과 같이 로봇 1의 큐브 진입 출력신호가 로봇 2의 큐브 금지 입력 신호로 연결되어 있는 경우, 로봇 1이 로봇 2보다 먼저 공통 큐브 영역의 진입조건이 되면 로봇 2는 정지 대기 합니다.
마찬가지로 로봇 2의 큐브 진입 출력 신호가 로봇 1의 큐브 금지 입력 신호로 연결되어 있는 경우, 로봇 2가 로봇 1 보다 먼저 공통 큐브 영역의 진입조건이 되면 로봇 1은 정지 대기합니다.