4.2. 협조 핸들링용 프로그램 티칭 및 프로그램 작성
4.2. 협조 핸들링용 프로그램 티칭 및 프로그램 작성
(1) 협조제어 대수만큼의 조작자가 필요합니다. 따라서 조작자는 협조할 로봇 수만큼 참여합니다. 단, TP 공유기를 이용하는 경우1명의 조작자가 모든 로봇을 동시 제어할 수 있습니다.
(2) 협조로봇 공통 좌표계 설정이 되어 있는지 확인합니다. 수동 협조 제어 모드전환 기능을 사용자키에 할당합니다.
(3) MATER와 SLAVE 로봇을 각각 협조 시작 위치로 이동시키고 기준위치로 시작위치를 기록합니다.

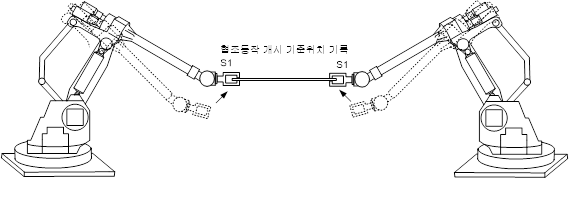
그림 4.1 협조동작 개시 기준위치 기록
(4) MASTER와 SLAVE 로봇을 F버튼에 할당한 사용자키를 이용하여 협조 상태(Cooperation Status)로 설정합니다. R351 코드를 입력하여 로봇의 역할을 지정하는 것도 가능합니다.
(5) 협조제어 개시 명령(COWORK M/S)을 등록합니다. COWORK 명령은 MASTER/SLAVE 인지를 지정하고 SLAVE/MASTER의 번호를 지정합니다. 이때 MASTER 로봇은 동일 그룹 내 1대만 설정 되어야 하고 SLAVE 로봇은 최대 3대까지 지정할 수 있습니다.

(6) MASTER 로봇을 조그(JOG)로 조작합니다. 이때SLAVE는 MASTER의 툴끝의 위치를 상대적인 위치로 추종합니다. 협조 조그 시에는 SLAVE도Enable 스위치를 누르고 있어야 합니다. 기록위치에 스텝을 Master에만 기록합니다. Slave 로봇 제어기에는 기록하지 않습니다.

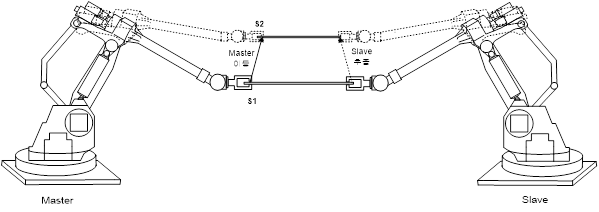
그림 4.2 Master 로봇 조작
(7) 협조 동작 스텝을 MASTER에 기록합니다. MASTER의 보간 종류 및 속도를 설정합니다. 협조동작 함수 내에서는 일반적인 MOVE명령을 사용합니다. (SMOV는 사용할 수 없습니다.)
(8) 협조 동작을 마치면 협조 제어를 종료(COWORK END)하는 명령을MASTER와 SLAVE에 삽입합니다.


l 수동 협조 조작 중 Slave의 Enable 스위치 상태를 OFF로 변경하지 마십시오. 하드웨어 신호가 통신신호보다 우선하여 처리되어 협조 로봇간 위치 어긋남이 발생합니다. 이 경우 심하면 작업물이나 로봇 핸드가 파손될 우려가 있습니다.