7.1.1. 아크센싱 파형 그리기
7.1.1. 아크센싱 파형 그리기
Arc용접 조건은 ARCON 명령어에서 [QuickOpen]키를 눌러서 진입할 수 있습니다. 협조제어가 설정되어 있는 시스템인 경우 용접조건 중 그림과 같은 <협조 제어 조건> 설정 항목이 나타납니다.
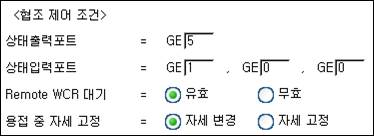
그림 7.1 용접조건 설정 대화상자의 협조 제어 조건 항목
n 상태출력포트: 협조제어 아크용접 시 아크용접 신호를 출력할 GE포트를 설정
n 상태입력포트: 협조제어 아크용접 시 아크용접 신호를 입력 받을 GE 포트를 설정. 최대 3대의 상대 로봇으로부터 아크용접 신호를 입력 받을 수 있음
n Remote WCR: 아크용접 과정 중 WCR(Welding Current Relay) 신호 입력 확인 시 상대 로봇의 WCR까지 확인할 것인지 설정
n 포트를 0번으로 설정할 경우 0번으로 설정된 입, 출력포트는 미사용
n GE 신호의 bit별 내용
Bit 0(ArcOn): ARCON 명령어가 실행되어 torch on 되면 1로 설정됨.
Bit 2(WCR): 설정된 로봇의 WCR이 입력되면 1로 설정됨.
Bit 3(Retry): 재시도 기능 수행 중. 재시도 종료 전까지 1로 설정됨.
Bit 4(Overlap): 재시작 기능 수행 중. overlap이 끝날 때까지 1로 설정됨.
Bit 5(Dry Run): 실제 용접은 하지 않고 로봇만 동작하는 Dry Run 시 1로 설정됨.
Bit 6(ArcSt): Arc on 이후 본 이동처리 전까지 1로 설정됨. Retry 상태도 포함됨.
n 용접 중 자세 고정: 협조제어 용접 중 슬레이브 로봇의 급격한 자세 변화를 막기 위한 기능. 이 항목이 설정되면 용접 중 토치의 자세는 고정되고 TCP위치만 이동.

l 협조제어에 사용되는 로봇들은 자신의 로봇 번호에 따라 입, 출력포트로 설정 가능한 포트 번호가 다릅니다. ‘표 6‑1 로봇 번호에 따른 출력/입력 영역’을 참조하십시오.
l Dry Run(용접 시뮬레이션)시에는 Remote WCR신호를 보내지 않아 용접 구간에서 협조제어를 할 수 없으므로 Dry Run 실행 시 해당 설정을 무효로 하여 사용하십시오.
l Remote WCR신호를 무효로 하고 용접을 수행하면 용접 구간에서 동기가 맞지 않을 수 있습니다.